Artificial Intelligence and Machine Learning: Unit V: Neural Networks
Error Backpropagation
Neural Networks - Artificial Intelligence and Machine Learning
Backpropagation is a training method used for a multi-layer neural network. It is also called the generalized delta rule. It is a gradient descent method which minimizes the total squared error of the output computed by the net.
Error
Backpropagation
•
Backpropagation is a training method used for a
multi-layer neural network. It is also called the generalized delta rule. It is
a gradient descent method which minimizes the total squared error of the output
computed by the net.
•
The backpropagation algorithm looks for the minimum
value of the error function in weight space using a technique called the delta
rule or gradient descent. The weights that minimize the error function is then
considered to be a solution to the learning problem.
•
Backpropagation is a systematic method for training
multiple layer ANN. It is a generalization of Widrow-Hoff error correction
rule. 80 % of ANN applications uses backpropagation.
•
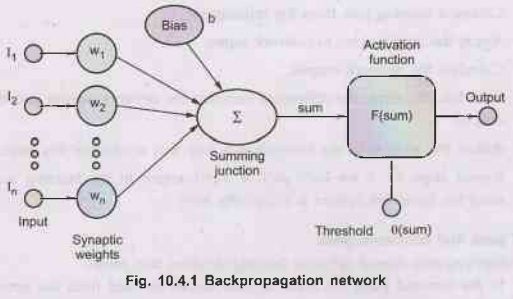
Fig. 10.4.1 (See on next page) shows backpropagation
network.
•
Consider a simple neuron:
a.
Neuron has a summing junction and activation function.
b.
Any non linear function which differentiable everywhere and increases
everywhere with sum can be used as activation function.
c.
Examples: Logistic function, Arc tangent function, Hyperbolic tangent
activation function.
•
These activation function makes the multilayer
network to have greater representational power than single layer network only
when non-linearity is introduced.
•
Need of hidden layers:
1. A
network with only two layers (input and output) can only represent the input
with whatever representation already exists in the input data.
2.
If the data is discontinuous or non-linearly separable, the innate
representation is inconsistent, and the mapping cannot be learned using two
layers (Input and Output).
3.
Therefore, hidden layer(s) are used between input and output layers
•
Weights connects unit (neuron) in one layer only to
those in the next higher layer. The output of the unit is scaled by the value
of the connecting weight, and it is fed forward to provide a portion of the
activation for the units in the next higher layer.
•
Backpropagation can be applied to an artificial
neural network with any number of hidden layers. The training objective is to
adjust the weights so that the application of a set of inputs produces the
desired outputs.
•
Training procedure: The network is usually trained with a large number of
input-output pairs.
1.
Generate weights randomly to small random values (both positive and negative)
to ensure that the network is not saturated by large values of weights.
2.
Choose a training pair from the training set.
3.
Apply the input vector to network input.
4.
Calculate the network output.
5.
Calculate the error, the difference between the network output and the desired
output.
6.
Adjust the weights of the network in a way that minimizes this error.
7.
Repeat steps 2 - 6 for each pair of input-output in the training set until the
error for the entire system is acceptably low.
Forward
pass and backward pass:
•
Backpropagation neural network training involves two
passes.
1.
In the forward pass, the input signals moves forward from the network input to
the output.
2.
In the backward pass, the calculated error signals propagate backward through
the network, where they are used to adjust the weights.
3.
In the forward pass, the calculation of the output is carried out, layer by
layer, in the forward direction. The output of one layer is the input to the
next layer.
•
In the reverse pass,
a.
The weights of the output neuron layer are adjusted first since the target
value of each output neuron is available to guide the adjustment of the
associated weights, using the delta rule.
b.
Next, we adjust the weights of the middle layers. As the middle layer neurons
have no target values, it makes the problem complex.
•
Selection of number of hidden units: The number of
hidden units depends on the number of input units.
1.
Never choose h to be more than twice the number of input units.
2. You
can load p patterns of I elements into log2 p hidden units.
3.
Ensure that we must have at least 1/e times as many training examples.
4.
Feature extraction requires fewer hidden units than inputs.
5.
Learning many examples of disjointed inputs requires more hidden units than
inputs.
6.
The number of hidden units required for a classification task increases with
the number of classes in the task. Large networks require longer training
times.
Factors
influencing Backpropagation training
•
The training time can be reduced by using:
1.Bias: Networks with biases can represent relationships between inputs
and outputs more easily than networks without biases. Adding a bias to each
neuron is usually desirable to offset the origin of the activation function.
The weight of the bias is trainable similar to weight except that the input is
always+1.
2.
Momentum: The use of momentum enhances the
stability of the training process. Momentum is used to keep the training
process going in the same general direction analogous to the way that momentum
of a moving object behaves. In backpropagation with momentum, the weight change
is a combination of the current gradient and the previous gradient.
Advantages and Disadvantages
Advantages
of backpropagation:
1.
It is simple, fast and easy to program.
2.
Only numbers of the input are tuned and not anyother parameter.
3.
No need to have prior knowledge about the network.
4.
It is flexible.
5. A
standard approach and works efficiently.
6.
It does not require the user to learn special functions.
Disadvantages
of backpropagation:
1.
Backpropagation possibly be sensitive to noisy data and irregularity.
2.
The performance of this is highly reliant on the input data.
3.
Needs excessive time for training.
Artificial Intelligence and Machine Learning: Unit V: Neural Networks : Tag: : Neural Networks - Artificial Intelligence and Machine Learning - Error Backpropagation
Related Topics
Related Subjects

Artificial Intelligence and Machine Learning
CS3491 4th Semester CSE/ECE Dept | 2021 Regulation | 4th Semester CSE/ECE Dept 2021 Regulation