Introduction to Operating Systems: Unit II(a): Process Management
Threads
Process Management - Introduction to Operating Systems
Thread is a dispatchable unit of work. It consists of thread ID, program counter, stack and register set. Thread is also called a Light Weight Process (LWP).
Threads
•
Thread is a dispatchable unit of work. It consists of thread ID, program
counter, stack and register set. Thread is also called a Light Weight Process
(LWP). Because they take fewer resources then a process. A thread is easy to
create and destroy.
•
It shares many attributes of a process. Threads are scheduled on a processor.
Each thread can execute a set of instructions independent of other threads and
processes.

• Every
program has at least one thread. Programs without multithreading executes
sequentially. That is, after executing one instruction the next instruction in
sequence is executed.
• Thread is a basic processing unit to
which an operating system allocates processor time and more than one thread can
be executing code inside a process.
• When user double click on an icon by
using mouse, the' operating system creates a process and that process has one
thread that runs the icon's code.
• Each
thread belongs to exactly one process and no thread can exist outside a
process. Each thread represents a separate flow of control.
•
Normally, an operating system will have a separate thread for each different
activity. The OS will have a separate thread for each process and that thread
will perform OS activities on behalf of the process. In this condition, each
user process is backed by a kernel thread. When process issues a system call to
read a file, the process's thread will take over, find out which disk accesses
to generate, and issue the low level instructions required to start the
transfer. It then suspends until the disk finishes reading in the data.
• When process starts up a remote TCP
connection, its thread handles the low-level details of sending out network
packets.
• In
Remote Procedure Call (RPC), servers are multithreaded. Server receives the
messages using a separate thread.
• Different operating system uses threads
in different ways.
1. Free memory is managed by kernel
thread in LINUX OS.
2. Solaries uses a kernel thread for
interrupt handling.
Thread Advantages
1. Context switching time is minimized.
2. Thread support for efficient
communication.
3. Resource sharing is possible using
threads.
4. A thread provides concurrency within
a process.
5.
It is more economical to create and context switch threads.
Difference between Thread and Process

Thread Lifecycle

2. Ready: Thread's start() method
invoked and now it is executing. OS put thread into Ready queue.
3. Running: Highest priority
ready thread enters the running state. Thread is assigned a processor and now
is running.
4.
Blocked:This is the state when a thread is waiting for a lock to access
an org object. il
5.
Waiting: Here thread is waiting indefinitely for another thread to
perform an action.
6. Sleeping: Thread
sleep for a specified time of period. When sleeping time expires, it enters to
ready state. CPU is not used by sleeping thread.
7.
Dead: When thread completes task or operation.
Thread Programming and Libraries
• The subroutines which comprise the
Pthreads API can be informally grouped into four major groups:
1.
Thread management: Routines that work directly on threads - creating,
detaching, joining, etc. They also include functions to set/query thread
attributes (joinable, scheduling etc.)
2. Mutexes: Routines that deal
with synchronization, called a "mutex", which is an abbreviation for
"mutual exclusion". Mutex functions provide for creating, destroying,
locking and unlocking mutexes.
3. Condition variables:
Routines that address communications between threads that share a mutex. Based
upon programmer specified conditions. This group includes functions to create,
destroy, wait and signal based upon specified variable values. Functions to
set/query condition variable attributes are also included.
4.
Synchronization: Routines that
manage read/write locks and barriers.
Basic thread functions include creation
and termination of threads. There are five such thread function.
pthread_create Function
• A program is started by exec, a single
thread is created known as initial thread or main thread. Additional threads
are created by pthread_create
#include <pthread.h>
int pthread_create (pthread_t *tid,
const pthread_attr_t *attr,
void *(*func) (void*), void* arg);
• Each thread is identified by a thread
ID, of which data type is pthread_t. Each thread has numerous attributes, its
priority, its initial stack size. The thread starts by calling this function
and then terminates explicitely or implicitly. The address of function is
specified as func argument which is called with a single pointer argument, arg.
pthread_join Function
• A thread can be terminated by calling
pthread_join. In Unix process pthread_create is similar to fork and
pthread_join is similar to wait pid.
#include<pthread.h>
int pthread_ join (pthread_ttid, void
**status);
The
tid is specified as the wait. But there is no way to wait for any of the
threads.
pthread_self Function
• Each thread
has an ID which identifies it within a given process. This thread ID is
returned by pthread_create and is used by pthread_join.
• A thread fetches this value for itself
by using ptheread_self.
#include <pthread.h>
pthread_tpthread_self
(void);
pthread_detach Function
• A thread is joinable or detachable.
When joinable thread terminates, its thread ID and exit status are retained
until another thread calls pthread_join.
• A detached thread is like a daemon
process i.e. when it is terminated all its resources are released. The
pthread_detach function changes the specified thread so that it is detached.
#include<pthread.h>
int
pthread_detach (pthread_ttid);
pthread_exit Function
A
way for a thread to terminate is to call pthread_exit.
#include <pthread.h>
void
pthread_exit (void *status);
• But if thread is not detached, its thread ID and exit status are retained for a later pthread_join by any other thread in calling processes.
pthread_sigmask, pthread_kill
The
prototype of the pthread_sigmask and pthread_kill functions are:
#include <signal.h>
#include
<pthread.h>
int
pthread_sigmask (int mode, sigset_t *sigsetp, sigset_t *oldstp);
int
pthread_kill (pthread_ttid, int signum);
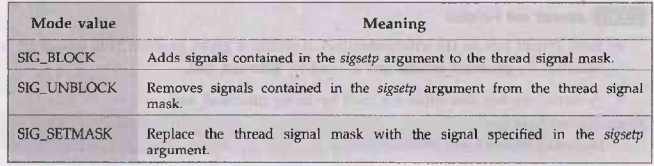
The pthread_sigmask function sets the signal mask of a calling thread. The sigsetpargument contains one or more of the signal numbers to be applied to the calling thread.
•
The mode argument specifies how the signal specified in the sigsetp argument is
to boxile be used. Possible value of mode argument is declared in
<signal.h> header and their meanings are:
• The pthread_kill function sends a
signal, as specified in the signum argument, to aafbesthread whose ID is given
by the tid argument. The sending and receiving threads must be in the same
process.
• If the default action for a signal is
to terminate the process, then sending the bas signal to a thread will still
kill the entire process.
sched_yield
The function prototype of the
sched_yield API is :
#include
<pthread.h>
int sched yield (void);
•
The sched_yield function is called by a thread to yield its execution to other
threads with the same priority. This function returns 0 on success and -1 when
fails.
Thread Scheduling
• An application can be implemented as a
set of threads, which cooperate and execute concurrently in the same address
space. Four general approach for multiprocessor thread scheduling are as
follows:
1.
Load sharing
2.
Gang scheduling
3.
Dedicated processor scheduling
4. Dynamic scheduling
1. Load sharing
• Threads are not assigned to a particular processor. When a processor is idle, it selects a thread from a global queue serving all processors.
b. In this method, load is evenly distributed among processors. No centralized scheduler is required.
• This
policy is implemented in different ways: FCFS and priority method is used.
These are depends upon queue structure.
Three
different versions of load sharing :
a.First-come-first-served (FCFS): On arrival of the thread, it is
placed at the end of the shared queue. Next ready thread is selected when
processor is idle. Processor executes the thread until its completion or
blocking.
b.
Smallest number of threads first: Shared ready queue is organized according to the priority.
Processor selects highest priority thread with the smallest number of
unscheduled threads. If the priority of the two thread is same, then FCFS
method is applied.
C.Preemptive smallest number of
threads first:
Highest priority is given to jobs with the smallest number of unscheduled
threads.
Advantages
of Load sharing
1.
No centralized scheduler is required.
2. Load distribution is equal.
3. Global queue is maintained by the
system.
Disadvantages
of Load sharing
1. It enforces mutual exclusion because of memory.
2.
High degree of coordination is required between the threads of a program.
3.
Caching becomes less efficient.
2.
Gang scheduling
• With gang scheduling, a set of related
threads is scheduled to run on a set of processors at the same time, on a
one-to-one basis.
• Synchronization
blocking may be reduced or increased.
•
If closely related processes executes in parallel, synchronization blocking may
be reduced.
• Set of related threads is scheduled to
run on a set of processors.
•
Gang scheduling has three parts.
1.
Group of related threads are scheduled as a unit, a gang.
2. All members of a gang run
simultaneously on different time shared CPUs.
3. All gang members start and end their
time slices together.
• The trick that makes gang scheduling
work is that all CPU are scheduled synchronously. This means that time is
divided into discrete quanta.
• An
example of how gang scheduling works is given in the Fig. 2.7.1. Here we have a
multiprocessor with six CPU being used by five processes, A through E, with a
total of 24 ready threads.

•
During time slot 0, threads Ao through A5 are scheduled and run.
To cops
•
During time slot 1, threads Bo, B1, B2, Co, C1, C2 are scheduled and run.
• During
time slot 2, D's five threads and Eo get to run.
• The
remaining six threads belonging to process E run in the time slot 3. Then the
cycle repeats, with slot 4 being the same as slot 0 and so on.
• Gang scheduling is useful for applications where performance severly degrades to toe when any part of the application is not running.
3.
Dedicated processor assignment
• When
application is scheduled, its threads are assigned to a processor.
• Some
processor may be idle and no multiprogramming of processors.
• Provides
implicit scheduling defined by assignment of threads to processors. For the
duration of program executation, each program is allocated a set of processors
equal in number to the number of threads in the program. Processors are chosen
from the available pool.
4.
Dynamic scheduling
• Number of threads in a process are
altered dynamically by the application.
• Operating
system and the application are involved in making scheduling decisions. The OS
is responsible for partitioning the processors among the jobs.
Operating system adjusts load to improve
the use
1. Assign idle processors.
lave
of Process Management
2.
New arrivals may be assigned to a processor that is used by a job currently
using more than one processor.
3.
Hold request until processor is available.
Introduction to Operating Systems: Unit II(a): Process Management : Tag: : Process Management - Introduction to Operating Systems - Threads
Related Topics
Related Subjects
Introduction to Operating Systems
CS3451 4th Semester CSE Dept | 2021 Regulation | 4th Semester CSE Dept 2021 Regulation