Artificial Intelligence and Machine Learning: Unit I(c): Uninformed Search Strategies
The Repeated States
Uninformed Search Strategies - Artificial Intelligence and Machine Learning
When we are finding solution by searching in state space tree, some states can be repeatedly explored. This will increase the total cost. Hence we need to avoid repeated states.
The
Repeated States
Avoiding Repeated States
When
we are finding solution by searching in state space tree, some states can be
repeatedly explored. This will increase the total cost. Hence we need to avoid
repeated states.
In
some problems we need to explore all the repeated states again as they may
reach to goal state.
For
example
Problems
where the actions are reversible, such as route-finding problems
and sliding-blocks puzzles.
Search
tree for these problems are infinite. But if we cut off some repeated states.
We can generate only the portion of the tree that engross the state space
graph.
In
some problems repeated states are not required to explore again as these states
will not surely lead to goal states.
In a
state space graph we can drop multiple paths and can construct a tree where
there is only one path to each state.
For
example -
Consider
the 8-queen problem. Here each state can be reached through only 1 path. If we
formulate the 8-queens problem such that a queen can be placed in any column,
then each state with 'n' queens can be reached by n! different paths.
Serious Problems Caused due to Repeated States
1)
Because of repeated states solvable problem can become unsolvable if the
algorithm is unable to detect repeated states.
2)
Because of repeated states looping paths can be generated which can lead to
infinite search which is not practical approach.
3)
Because of repeated states memory is unnecessarily wasted as same state is
maintained multiple times.
Example of State Space that Generate an Exponentially Larger Search Tree
a)
Fig 3.6.1 shows a state space in which there are two possible actions leading
from A to B, two from B to C and so on. The state space contains d+1 states,
where d is maximum depth.
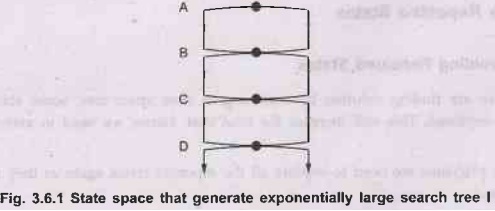
Fig.
3.6.1 State space that generate exponentially large search tree 1
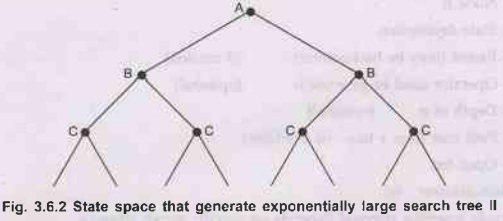
b) In the above search tree, (Fig. 3.6.2) there are 2d branches corresponding to the 2d paths through the space.
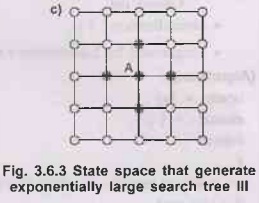
In
the search tree shown in Fig. 3.6.3, A is a root node. On a grid each state has
four successors, therefore the tree including repeated states has 4d leaves.
But as we can see, only about 2 d2 are distinct states within d steps of any
given state.
Note If limit of depth in state space tree is specified then it is
easy to reduce repeated states which leads to exponential reduction in search
cost.
Algorithm that can Avoid Repeated States
If
an algorithm remembers every state that it has visited, then it can be viewed
as exploring state space graph directly.
We
can device a new algorithm called as graph-search algorithm which is more
efficient than earlier tree-search algorithm. A graph-search algorithm
maintains two data structures closed list and open list to avoid exporation of
those node which are already explored (i.e. trying to avoid repeated states).
Close
list: A closed list is a data structure
maintained by algorithm which stores every expanded node. Algorithm discards
the current node if it matches with node on the closed list.
Open
list: A open list is a data structure
maintained by algorithm which stores fringe of unexpanded node.
Graph-Search
Algorithm
[Data structure required]:
- Node n
-State description
- Parent (may be backpointer)
(if needed)
-Operator used to generate n
(optional)
- Depth of n(optional)
- Path cost from s to n (if available)
- Open list
• initialization:
{s}
• node
insertion removal depends on specific search strategy
- Closed list
• initialization:
{ }
• organized
by backpointers to construct a solution path
[Algorithm]:
open : ={s};
closed : = {};
repeat
{
n : = select (open); /*
select one node from open for expansion */
if n is a goal
then exit with success; /* delayed goal testing */
expand (n)
/* generate all children of n put these newly generated nodes in
open (check duplicates)
put n in closed (check duplicates) */
until open = {};
}
exit with failure
For
the above algorithm worst case time and space requirements are proportional to
the size of the state space. This may be much smaller than O (bd).
Artificial Intelligence and Machine Learning: Unit I(c): Uninformed Search Strategies : Tag: : Uninformed Search Strategies - Artificial Intelligence and Machine Learning - The Repeated States
Related Topics
Related Subjects

Artificial Intelligence and Machine Learning
CS3491 4th Semester CSE/ECE Dept | 2021 Regulation | 4th Semester CSE/ECE Dept 2021 Regulation