Artificial Intelligence and Machine Learning: Unit I(c): Uninformed Search Strategies
Searching with Partial Information
Uninformed Search Strategies - Artificial Intelligence and Machine Learning
All the earlier search strategies we have seen, assumed that environment is fully observable and deterministic.
Searching
with Partial Information
AU:
Dec.-10
All
the earlier search strategies we have seen, assumed that environment is fully
observable and deterministic.
In
such a environment agent -
1)
Knows what is the effect each action.
2)
Can calculate exactly which state results from any sequence of actions.
3)
Knows which state it is in.
4)
Does not get new information after each action.
If
environment is not fully observable and knowledge of the states and actions is
incomplete then agent has different types of task environment. Such a
environment leads to three distinct types of problems -
1) Sensorless problems
2)
Contigency problems
3)
Exploration problems.
Sensorless Problems (Conformant Problems)
In
this type of problems -
A)
Agent has no sensors at all
B)
According its own knowledge agent could be in one of several possible
initial states.
C)
As agent has several possible initial states each action can lead to one of the
several possible successor states.
•
Solving sensorless problems in a fully observable,
completely known, deterministic environment →
In
sensorless problem agent already have predefined knowledge about its various
states. Out of these state set only one of the state is going to be initial
state. Though agent has no sensor, hence no percepts, still from its own state
and action it can reach to certain conclusion states, through which it can
further reach to goal state. It means that we can say agent can coerce (force
to reach) the world to reach at a perticular expected state on his own.
Steps
taken to solve the problem are as follows -
1)
First agent searches for belief state instead of physical state.
[The
belief state - it is a set of states representing agent's current belief about
the possible physical states it might be in. For finding such belief state
agent should have reasoning for each state it can be in, based on its original
knowlege].
2)
Initial state is belief state which can further mapped to another belief state.
3)
Action is applied to belief state by taking union of the results obtained from
applying the action to each physical state in the belief state.
4)
We now get a path which connects several belief states.
5)
Solution is a path that leads to a belief state, all of whose members are
goal states.
Note If the physical state space has 's' states, the belief state
space will have 25 belief states.
For
Example
•
Black ball picker robot
Contigency Problem
If
environment is partially observable or if actions are uncertain, then agent can
sense and perceive new information after each action. This new information can
lead to new problem (or critical situation) which is called as contigency. If
this situation occurs then agent needs to plan next action to handle this
contigency.
•
Solving contigency problem -
1)
For contigency problem one needs to form a tree, here each branch of a tree may
be selected depending upon the percepts received upto that point in the tree.
2)
Then by searching and expanding previous level agent can reach to a goal.
In
some situations for contigency problems we get purely sequential solutions.
Note Searching algorithm for contigency problems are more complex than
algorithms we have studied so far.
The
agent design is also different for these problems, because agent can act before
it has found a guaranteed plan.
Agent
continue to solve problem, considering new information and minimizing he
contigency by checking the output of its action. This is termed as interleaving
of searching and execution. [That is alternately search and execution is done].
For
example:
Trading
agent
• Special case of contigency problem: A contigency problem is called as adversarial problem if
the uncertainty is caused by the actions of another agent. (More adverse
situation).
For
example -
Agent
in game of chess.
Extreme Case of Contigency Problem
Exploration
problem: When state as well as the actions of the environment are unknown the
agent must act to discover them. The interleaving of searching and execution
would be useful to solve exploration problem.
For
example -
The
boat driving robotic agent.
Solved
Examples
Example 3.7.1 Write
production rules for eight puzzle problem.
Solution: A block of 8 tiles is given in a certain position. One tile could
be moved at the vacant position and the desired goal state is to be achieved.
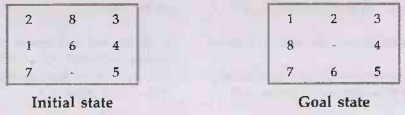
The
state space representation for 8-puzzle problem.
The
heuristic used for the solution is:
See
if tile is in its right position i.e. at the position of the Goal state. If so
then assign weight (tile) = 1. If not then don't assign any weight to it. Now
add the weights of all tiles and select the next state as the situation with
maximum weight. This is because higher the weight more number of tiles are in
their correct positions and we can get the Goal state.
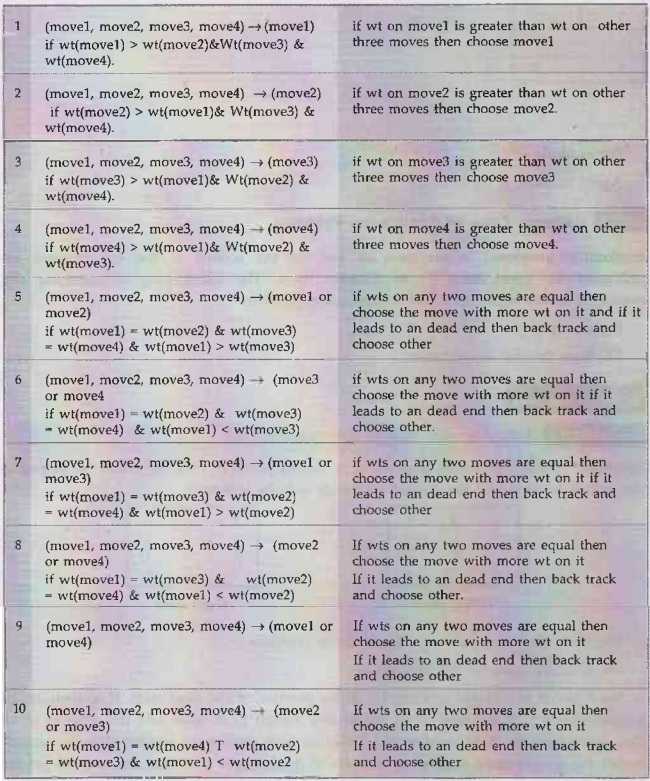
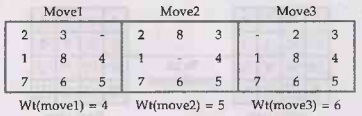
Now
here there can be maximum 4 possible moves i.e. move1, move2, move3, move4.
So
the production rules are:
Now
lets apply these rules to solve below problem:

Step
1:
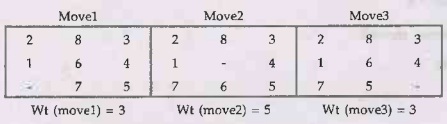
So
applying rule 2 we choose move2.
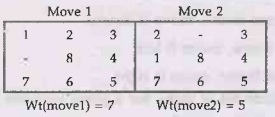
Step
2:
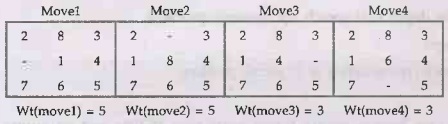
So applying rule
5 we chose move2.
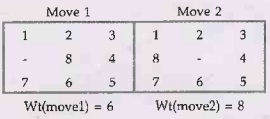
Step
3:
So
applying rule 1 we choose move1.
Step
4:
So
applying rule 1 we choose movel.
Step
5:
So
applying rule 2 we choose move 2.
And
we get the Goal State.

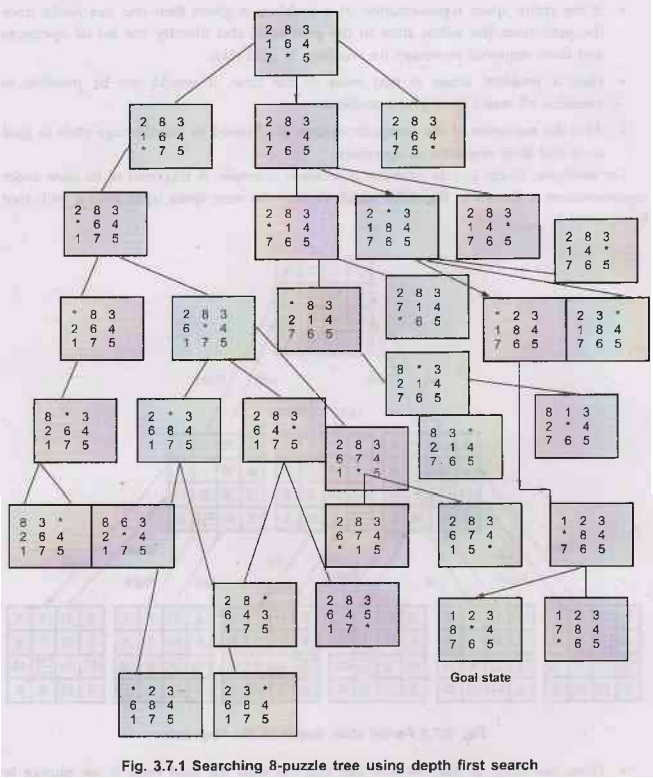
Example 3.7.2 Give DFS for 8 puzzle problem.
A
search tree produced by depth first search for 8-puzzle problem.
(See
Fig. 3.7.1 on next page).
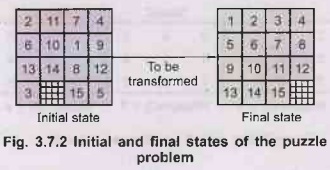
Example 3.7.3 Give a
state space representation of 15 puzzle problem.
Solution:
•
In 15 puzzle problem, we have a square frame
containing 15-tiles and an empty slot, i.e., total 16 subsquares. The tiles are
numbered from 1 to 15. We can move the tiles in square frame by moving a tile
into empty slot.
•
The goal state is one having the tiles in numerical
order with the last square an empty slot as shown in Fig. 3.7.2.
•
Initial and final states are shown in Fig. 3.7.2. And
the operators for this problem are -
UP -
If the hole is not touching the top frame, move it up.
DOWN
- If the hole is not touching the bottom frame, move it down.
LEFT
- If the hole is not touching the left frame, move it left.
RIGHT
- If the hole is not touching the right frame, move it right.
•
In state space representation we have all possible
set of states for a given problem. Or state space is a directed graph with all
the states as nodes.
•
A node is said to exist if it is possible to obtain
it from the initial state by application of a set of operators.
•
One can reach to another state or another node by
applying an operator on first state.
•
If the entire space representation of a problem is
given then one can easily trace the path from the initial state to the goal
state and identify the set of operators and their sequence necessary for
reaching to goal state.
•
Here a problem arises is that most of the time, it
would not be possible to visualize all states for a given problem.
•
Also the resources of the computer system are limited
to handle huge state to goal state and their sequence of operators.
For
example, 15-tile puzzle problem is a classic example. A fragment of its state
space representation is shown in Fig. 3.7.3 which depicts the state space upto
level 2 with root being level 0.
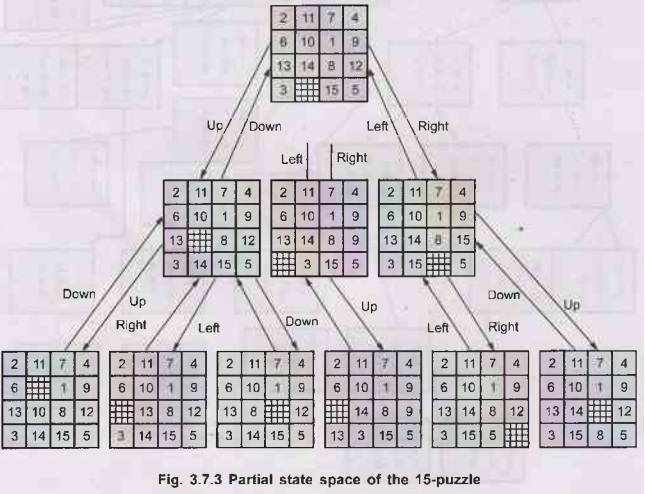
•
Here, the irony is that we will not end up with the
goal even if we plunge to another level also.
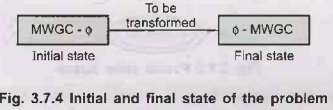
Example 3.7.4
Give state space representation for the farmer, wolf, goat and cabbage
problem stated below -
A
farmer with his wolf, goat and cabbage come to the edge of a river, they wish
to cross - There is a boat at the rivers edge, but only the farmer can row, the
boat can carry two things at a time (including the rower). If the wolf is ever
left alone with the goat, the wolf will
eat the goat, similarly, if the goat is left alone with the cabbage, the goat
will eat the cabbage. Give the search tree and identify a sequence of crossing
of the river so that all four characters arrive safely on the other side of the
river.
Solution:
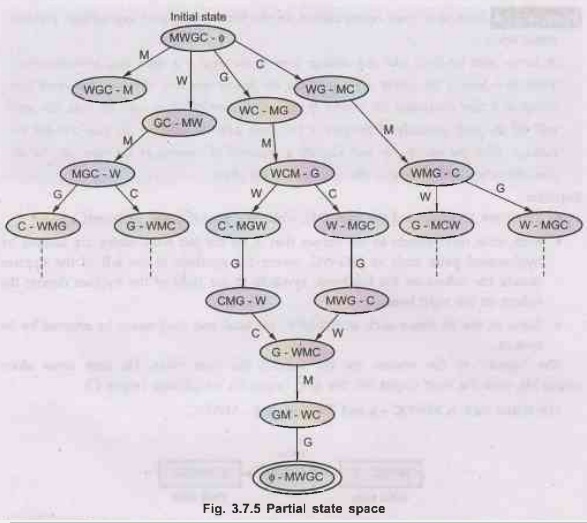
•
There are 16 subsets of the man (M), wolf (W), goat
(G) and cabbage(C).
•
Each state corresponds to the subset that is on the left
bank states are labeled by hyphenated pairs such as MG-WC, where the symbols to
the left of the hyphen denote the subset on the left bank; symbols to the right
of the hyphen denote the subset on the right bank.
•
Some of the 16 states such as CG-MW, are fatal and
may never be entered by the system.
The
"inputs" to the system are the actions the man takes. He may cross
alone (input M), with the wolf (input W), the goat (input G), or cabbage (input
C).
The
initial state is MWGC - and the state is - MWGC.
•
Sequence of crossing of the river so that all four
characters arrive safely is -
i) First
man cross the river with goat.
ii) Man
come back.
iii)
Man takes either cabbage (or wolf) with him to another side.
iv) Man
comes back with goat to first side.
v) Man
takes wolf (or cabbage) with him him to another side.
vi) Man
comes back.
vii)
Man takes goat with him to another back.
This
sequence is shown by dark lines in Fig. 3.7.5.
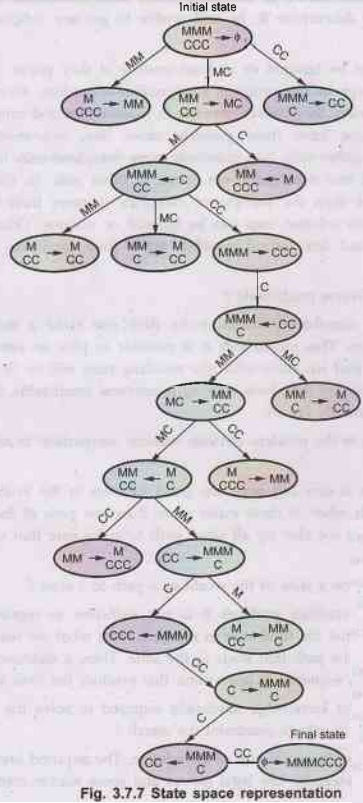
Example 3.7.5
Consider the missionaries and cannibals problem. Analyze this problem with
respect to seven problem characteristics and find a good state space
representation.
Solution:
•
The missionaries and cannibals problem - Three missionaries and three cannibals find themselves on
one side of a river. They have agreed that would all like to get to the other
side. But missionaries are not sure what else the cannibals have agreed to, so
missionaries want to manage the trip across the river in such a way that number
of missionaries on either side of the river is never less than the number of
cannibals who are on the same side. The only one boat available hold only two
people at a time. How can everyone get across the river without missionaries
risking being eaten?
•
Analysis of problem with respect to problem characteristics
- It encompasses a variety of specific
technique, each of which is particularly effective for a small class of
problem. In order to choose most appropriate method, it is necessary to analyze
along seven key dimension -
1)
Is the problem decomposable into a set of independent smaller or easier
subproblem?
The
missionaries and cannibals problem is not decomposable because here every
movement of either missionaries or cannibals effect next movement missionaries
or cannibals. If one try to decompose it, he will unable to get any subproblem
which is independent of others.
2)
Can solution steps be ignored or at least undone if they prove? unwise. Here
many solution steps in the problem are ignored or undone when they proved
unwise. undone when they proved unwise. In missionaries and cannibals problem,
in initial state one have three possible move like, two missionaries move
simultaneously to other side, two cannibals move simultaneously to other side,
or one cannibal and one missionary can move to other side. In first case, if
two missionaries move then the number of cannibals is more than the number of
missionaries so this solution step can be ignored or undone. Other two possible
moves can be used but second possible move (two cannibals move) will be ignored
further.
3)
Is the problem universe predictable?
In
missionaries and cannibals problem, every time one make a move, one know
exactly what will happen. This means that it is possible to plan an entire
sequence of move and be confident that we know what the resulting state will
be. So, by explaining all the above, it means to say that, here nothing is
universe predictable, means result of every possible move is exactly known.
4)
Is a good solution to the problem obvious without comparison to all other
possible solution?
In
the problem there is one and only one good solution to the problem. Hence no
need to compare it with other. If there exists more than one path of the solution
then one cannot be sure unless we also try all other path to make sure that
none of them is more efficient.
5)
Is the desired solution a state of the world or a path to a state?
In
missionaries and cannibals problem it is not sufficient to report that one has
solved the problem and that the final state is reached. Here what we really
must report is not the final state but the path that leads to the state. Thus,
a statement of a solution to this problem must be a sequence of operations,
that produce the final state.
6)
Is a large amount of knowledge absolutely required to solve the problem, or is
knowledge important only to constraint the search?
Here
there is no need of large amount of knowledge. The required knowledge is very
little - just the rule for determine the legal moves and some simple control
mechanism
that
implements an appropriate search procedure. Additional knowledge about such
things as good strategy and tactics could of course help considerably to
constraint the search and speed up the execution of the program.
7)
Can a computer, given the problem return the solution, or will the solution of
the problem require interaction between the computer and person?
In
the problem, there is no need of interaction between the computer and person.
Here, given the problem, set of rule and a final state it returns the solution
with each intermediate step.
•
State space representation of missionaries and
cannibals problem - In state
space representation, every missionary is denoted by M and cannibals is denoted
by C. Numbers of M's and C's show the number of missionaries and cannibals.
Circle represents the state and arrow represents the forward and backward move.
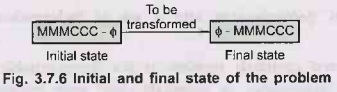
Example
3.7.6 You
are given two jugs, a 4-gallon jug and a 3-gallon jug. Neither has any
measuring markers on it. There is a pump that can be used to fill the jug with
water. How can you get exactly 2 gallons of water in the 4-gallon jug?
Solution:
•
For solving above problem, first of all state space
or global database for this problem has to be described as the set of ordered
pairs of integers (x, y), such that x = 0, 1, 2, 3 or 4 and y = 0, 1, 2, 3.
•
Here, x represents the number of gallons of water in
4-gallon jug and y represents the quantity of water in the 3-gallon jug. The
starting state is (0, 0) i.e. no water in both the jugs. And the termination
condition or global state is (2, n) i.e., 2 gallon water in 4-gallon jug and n
gallon water in 3-gallon jug and here n can have any value as it is not
mentioned in the question.
•
With the given condition in question, we have to make
some more assumptions as -
1)
One can fill the jug from a pump any number of times.
2)
One can pour the water from one jug to another jug.
3)
One can pour the water out of the jug onto the ground.
4)
There are no other measuring devices available including no measuring marks
available on jugs etc.
Now,
further we have some productions rules for water jug problem as given in Fig.
3.7.8.
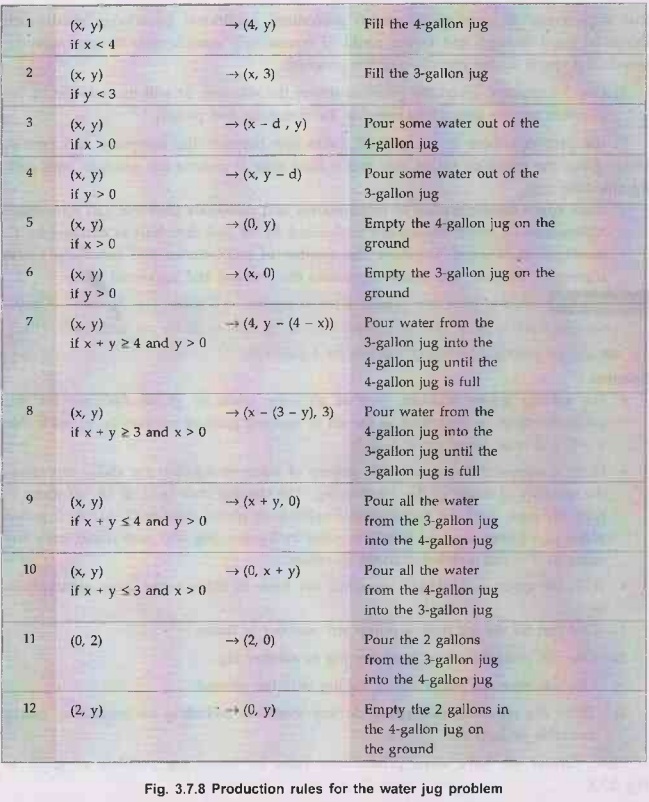
1)
Here, the first rule indicates that 4-gallon jug is filled completely as trying
to fill a already filled jug is waste.
2)
Similarly second rule shows that the 3-gallon jug is filled completely.
3)
Third rule indicates that some amount of water (say d) is poured on the ground
from 4-gallon jug. So resulting state is (x - d, y).
4)
Fourth rule indicates removal of d amount of water from 3-gallon jug. That
shows the resulting state (x, y - d).
5)
Fifth rule indicates that all the water of 4-gallon jug is poured out onto
ground so in resulting state 4-gallon jug is empty (0, y).
6)
Similarly as above in sixth rule, 3-gallon jug is made empty (x, 0).
7)
Seventh rule shows that, we pour water form 3-galon jug into 4-gallon jug until
4-gallon jug is full.
So,
resulting state is (4, y - (4 - x)).
8)
Similarly, eight rule shows that water is poured from 4-gallon jug, into the
3-gallon jug until 3-gallon jug is full.
So,
resulting state is (x - (3 - y), 3).
9)
Nineth rule indicates that all the water from 3-gallon jug is poured into
4-gallon jug considering that x + y ≤ 4.
It
results into a final state (x + y, 0).
10)
Similarly, tenth rule indicates that all the water is poured from 4-gallon jug
into Tog to the 3-gallon jug resulting into a state (0, x + y) considering x +
y ≤3.
11)
Eleventh rule shows that 3-gallon jug has only 2-gallon water that is poured 2
completely into empty 4-gallon jug.
12)
Twelth rule indicates that 2-gallon water from 4-gallon jug is poured out of
the jug.
Now
we look for the solution of this problem each one operator has to be chosen,
from above given operators. These operators will be rules whose left sides are
watched against the current state and whose right sides describes the new state
that results from applying the rule.
One
solution of this problem is given in Fig. 3.7.9.
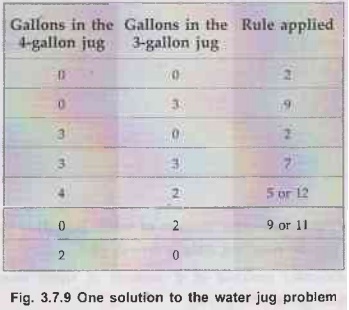
i. In
the initial state, we have two empty jugs - one 4-gallon jug and one 3-gallon
jug represented by the state (0, 0).
ii. Now,
we fill 3-gallon jug completely by a pipe applying rule 2 resulting into a
state (0, 3).
iii. Further we pour all the water from 3-gallon jug into the
4-gallon jug using rule 9 resulting into the state (3, 0)...
iv. Further,
again by applying rule 2 we fill the 3-gallon jug full, resulting into the
state (3, 3).
v. Now,
by applying rule 7 we pour water from 3-gallon jug into 4-gallon jug so that
4-gallon gets full resulting into the state (4, 2).
vi. Further
by applying rule 5 or 12 we make 4-gallon jug empty, resulting into the state
(0, 2).
vii.
Now, by applying rule 9 or 11 we pour all the water from 3-gallon jug into
4-gallon jug resulting into the state (2, 0) i.e., our termination condition or
goal state.
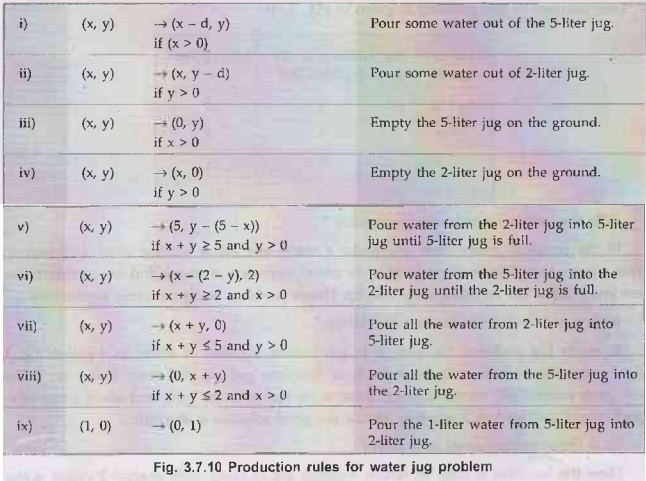
Example 3.7.7 Specify a global database, rules and
termination condition to solve the given water jug problem.
Given
a 5 liters jug filled with water and an empty 2 liter jug, how can one obtain
precisely 1 liter in 2 liters jug? Water may either be discarded or poured from
one jug to another; however no more than the 5 liter is available?
Solution: For this problem with
given conditions, we can make some production rules, which are as follows -
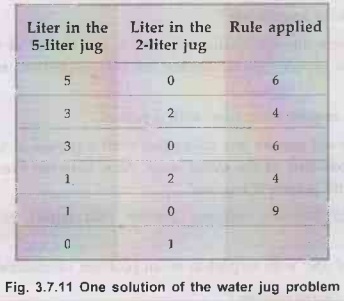
Now,
look for the solution of the problem.
Example 3.7.8
Analyze Water jug problem with respect to the seven problem characteristics.
Solution Analysis of water jug problem with respect to the seven problem
characteristics are as follows-
i. Is
the problem decomposable?
In
water jug problem, the goal is to get exactly 2 gallons of water in the
4-gallon jug. The idea of this solution is to reduce the problem into two
subproblem, which is not possible. Even if one devide it into subproblem, they
not independent.
ii. Can
solution be ignored or undone?
In
our problem suppose program makes a stupid move and realizes it a couple of
moves later. It cannot simply play as through it had never made the stupid
move. All it can do is to simply back up and start the game over from that
point.
iii.
Is the problem's universe predictable?
In
the problem, every time one make a move one know exactly what will happen. This
means that it is possible to plan as entire sequence of move and be confident
that are know what the resulting state will be. Hence problem is not universe
predictable.
iv. Is
a good solution absolute or relative ?
In
water jug problem, the goal is to get exactly 2-gallon of water in 4-gallon
jug. It does not matter which path one follows or how one got the goal state.
If one do follow one path successfully to the answer, there is no reason to go
back and see if some other path might also lead to a solution. Hence the good
solution is absolute.
v. Is
the solution a state or a path?
Here
the solution is state in which 4-gallon jug is filled with exactly 2-gallon
water, but the way or path does matter.
vi. What
is the role of knowledge?
In
water jug problem, the knowledge required is, just the set of rules for
determining legal move and some simple control mechanism that implement an
appropriate search procedure.
vii.
Does the task require interaction with a person.
The
problem does not require any interaction with a person. It just requires
problem, set of rules and a goal state at the initial stage. Now between
execution no knowledge and no interaction with person is required.
Example 3.7.9
Analyze travelling salesman problem with respect to the seven problem
characteristics.
Solution: Analysis of TSP with
respect to seven problem characteristics are as follows –
i. Is
the problem decomposable?
This
problem is not decomposable. In this problem, the goal is to find shortest path
that visit each city exactly once, and hence whole problem will be considered
simultaneously.
ii. Can
solution steps be ignored or undone?
In
TSP suppose program makes a stupid move means choose the path which is not a
shortest path and realizes it a couple of move later. It cannot simply go
further as through it had never made wrong move. All it can do is to start the
game again and try to make the best of the current situation and go on from
there. So solution steps cannot be ignored or undone.
iii.
Is the universe predictable?
In
travelling salesman problem, every time one choose a city it is know exactly
which will be the next choice, because here all the distance between each
cities are known. So here it is possible to plan an entire sequence of move.
One can use planning to avoid having to undo actual move. So there is nothing
universe predictable.
iv. Is
a good solution absolute or relative?
In
the problem, goal is to find the shortest route that visit each city exactly
once, suppose cities to be visited and distance between them are shown in Fig.
3.7.12.
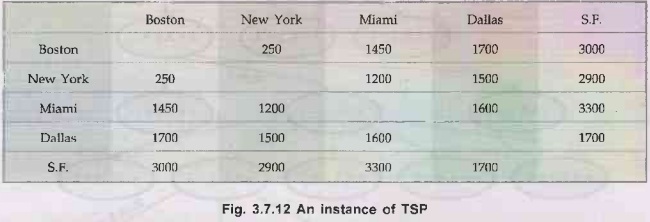
One
place the salesman could start, is Boston. Now the next city he has to visit
cannot be sure unless we also try all other path to make sure that none of them
is shorter. Hence, the good solution is relative but not absolute.
i. Is
the solution a state or a path?
The
goal of the problem is to find the shortest path that visit each city exactly
once. For this type of problem one really must report is not the final state
but the path one found to that state. Thus, a statement of a solution to this
problem must be a sequence of operations that produces the final state.
ii. What
is the role of knowledge?
The
required knowledge is just the knowledge of the cities to be visited, the
distance between these cities and some simple control mechanism that implement
an appropriate search process.
iii.
Does task require interaction with a person.
In
travelling salesman problem, there is no need to interact with person.
Example 3.7.10
Give state-space representation of the following
i)
Water jug problem
Solution: i) Water jug problem - State space representation of water jug problem is given below
according to the twelve possible rules.
For
all the production rules of water jug problem refer to example 3.7.6.
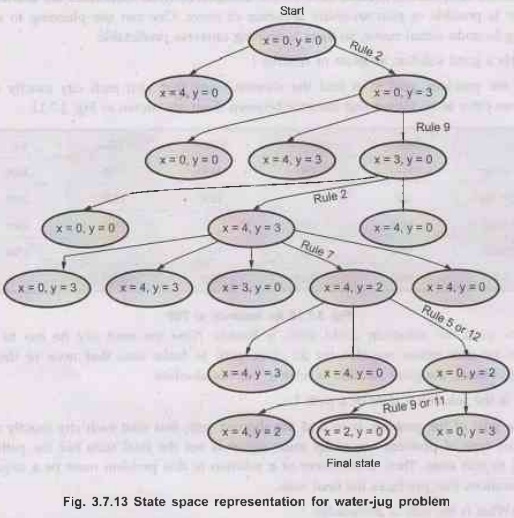
• Each state in state space representation is denoted as (x,
y).
• Here x is an 4-gallons jug while y is an 3-gallons jug.
Value in place of x denotes the amount of water in 4-gallons jug and value of y
denotes amount of water in 3-gallons jug.
• Each state enclosed within a circle shows the resultant
state after application of appropriate rule on that state.
• Initial state is represented as start state while final
state is enclosed within double circle.
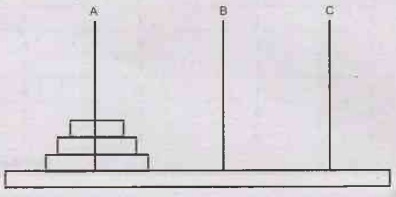
Example 3.7.11
Three pegs labeled A, B and C are given in which peg A has finite number of
disks (n) with decreasing size. The task of the game is to move the disks from
peg A to peg C using peg B as an auxiliary. The rules of the game are as
follows:
i)
Only one disk may be moved at a time specifically, only the top disk on any peg
may be moved to any other peg.
ii)
At any time the large disk can't be placed on a smaller disk.
Solve
the problem and describe the following terms:
a) State
b) Initial state c) Goal state d) Operators e) Solution.
Solution: a) State:
{(A,
B, C), A = 3, B = 0, C = 0}
A
Number of disks in peg A
B -
Number of disks in peg B
C -
Number of disks in peg C
b)
Initial state:
{(A,
B, C) = (3, 0, 0)}
c)
Goal state:
{(A,
B, C) = (0, 0, 3)}
d)
Operators:
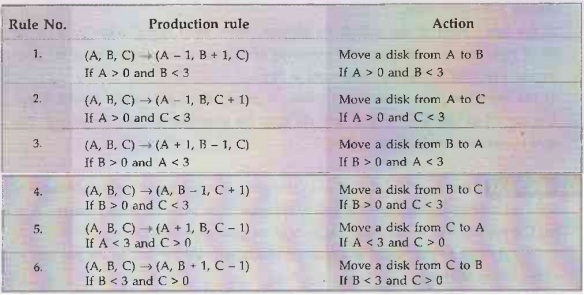
Condition: Each move operation is performed with a condition that no larger
disk can be placed on a smaller disk.
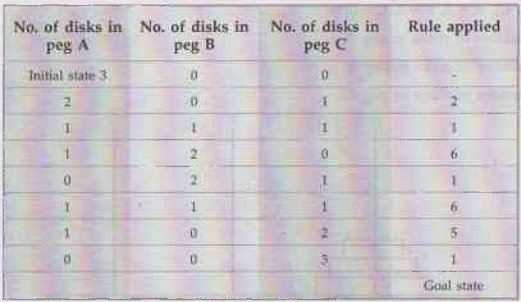
e)
Solution:
Example 3.7.12
Give the initial state, goal test, successor function and cost function for
each of the following. Choose a formulation that is precise enough to be
implemented.
a)
You have to color a planner map using only four colors, in such a way that no
two adjacent regions have the same color.
b) A
3-feet tall monkey is in a room where some bananas are suspended from the
8-feet ceiling. He would like to get the bananas. The room contains two
stackable, movable, climable 3-feet-high crates.
c)
You have a program that outputs the message "illegal input record"
when fed a certain file of input records. You know that processing of each
record is independent of the other records. You want to discover what record is
illegal.
d)
You have three jugs, measuring 12 gallons, 8 gallons and 3 gallons and a water
fancet. You can fill the jug up or empty them out from one to another or onto
the ground. You need to measure out exactly one gallon.
Solution:
a)
Initial state:
No regions colored
Goal
test: All regions colored, and no two adjacent
regions have the same color.
Successor
function: Assign a color to a region.
Cost
function: Number of assignment.
b)
Initial state: Monkey is in a room, where
some bananas are hanging on the ceiling.
Goal
test: Monkey has bananas.
Successor
function: Hop on crate; Hop off crate; push crate
from one step to another; walk from one step to another; grab bananas (if
standing on crate)
Cost
function: Number of actions.
c)
Initial state: Considering all input
records.
Goal
test: Considering all input records.
Successor
function: Run all the records sequentially.
Cost
function: A single record, which gives
"illegal input" message.
d)
Initial state: Jugs have values [0, 0, 0]
Successor
function: Given values [x, y, z], generates [12,
y, z], [x, 8, z], [x, y, 3] (by filling); [0, y, z], [x, 0, z], [x, y, 0] (by
emptying); or for any two jugs with current values x and y, pour y into x, this
changes the jug with x to the minimum of x + y and the jug with y decrements by
the amount gained by the first jug.
Goal
state: Fill the 12 gallon jug, from this fill
the other 2 jugs with 8 gallon and 3 gallon you will get exactly one gallon of
water in the first jug.
Cost
function: Number of actions.
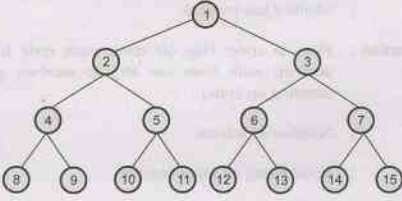
Example 3.7.13 Consider a state space where the start state is
number 1 and the successor function for state n returns two states, numbers 2n
and 2n + 1.
a)
Draw the portion of the state space for states 1 to 15.
b)
Suppose the goal state is 11 list the order in which nodes will be visited for
breadth-first search with limit 3 and iterative deepening search.
c)
Would bidirectional search be appropriate for this problem? If so, describe in
detail how it would work.
d)
What is the branching factor in each direction of the bidirectional search?
e)
Does the answer to (c) suggest a reformulation of the problem that would allow
you to no solve the problem of getting from state 1 to a given goal state with
almost no search.
Solution:
a) State space:
b)Breadth-first
search: 1 2 3 4 5 6 7 8 9 10 11
Depth
limited search: 1 2 4 89.5 10 11
Iterative
deepening search: 1; 1 2 3; 1 2 4 5 3 6 7;
1 2
4 8 9 5 0 11
c)
Bidirectional search is very useful, because search done in both the directions
at the same time.
d) 2
in the forward direction; 1 in the reverse direction.
e)
Yes, start at the goal, and apply the single reverse successor action until you
reach 1.
Example 3.7.14
Consider a sliding block puzzle with the following initial configuration. There
are three black tiles (B), three white tiles (W) and an empty cell (E). The
puzzle has the following moves

•
A tile may move into an adjacent empty cell with unit
cost
•
A tile may hop over at most two other tiles into
an empty cell with a cost equal to the number of tiles hopped over
The
goal of the puzzle is to have all of the white tiles to the left of all of the
black tiles. (without regard to position of empty cell.)
Solution: The goal configuration is

The
heuristic function is
g'
is 1 for every level of the tree
X →
number of tiles hopped over
Y→
number of tiles out of place.
h' =
X + Y
f '
= g'+h'
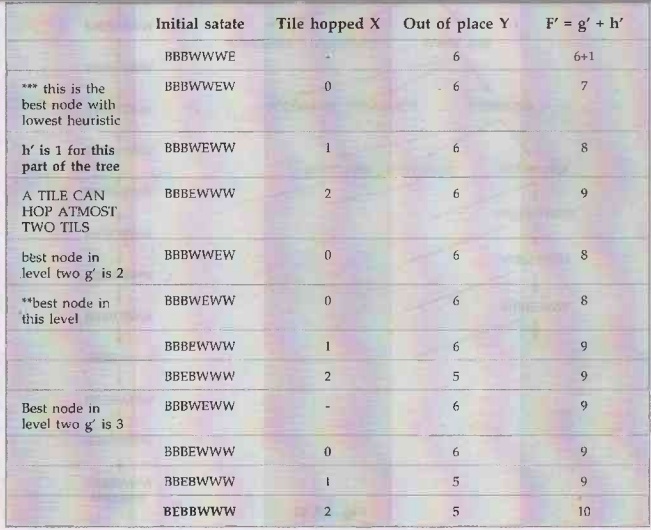
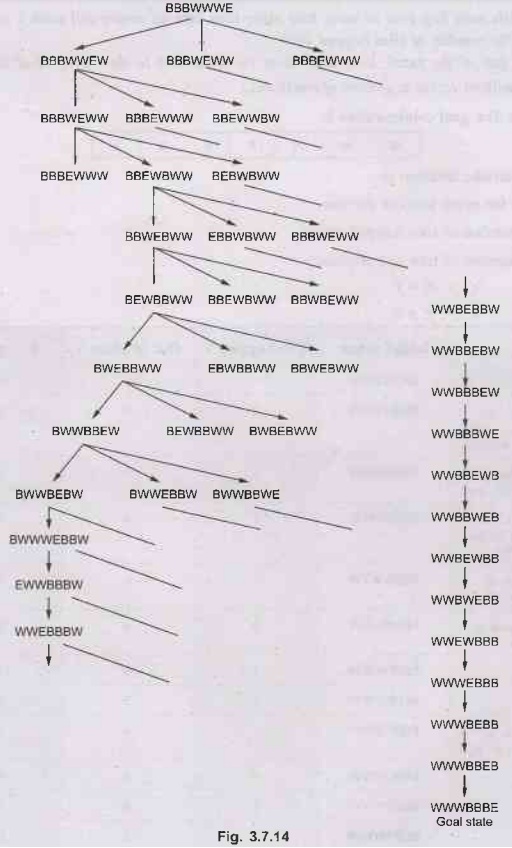
The
search continues in this way and the search tree is as follows in Fig. 3.7.14.
Example 3.7.15
Give the breadth-first search, depth-first search, depth-limited search (limit
= 2) and iterative deepening search and list the name of the nodes in order by
the algorithms for the search of node C in the search space showing figure. AU: Dec.-10, Marks 16
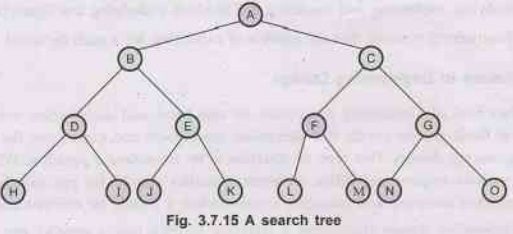
Solution: Following is the node list in which nodes are listed according to
the order, the algorithm will visit them.
1)
BFS
A,
B, C, D, E, F, G, H, I, J, K, L, M, N, O.
2)
DFS
A,
B, D, H, I, E, J, K, C, F, L, M, G, N, O.
3)
DLS (limit= 2)
A,
B, D, E, C, F, G.
4)
IDDFS
(It
searches in DLS manner until goal is not reached).
(Assuming
goal node is not specified in the given node tree then IDDS will search in
following manner).
Limit
= 0
A
Limit
= 1
A,
B, C.
Limit
= 2
A,
B, D, E, C, F, G.
Limit
= 3
A,
B, D, H, I, E, J, K, C, F, L, M, G, N, O.
Artificial Intelligence and Machine Learning: Unit I(c): Uninformed Search Strategies : Tag: : Uninformed Search Strategies - Artificial Intelligence and Machine Learning - Searching with Partial Information
Related Topics
Related Subjects

Artificial Intelligence and Machine Learning
CS3491 4th Semester CSE/ECE Dept | 2021 Regulation | 4th Semester CSE/ECE Dept 2021 Regulation