Artificial Intelligence and Machine Learning: Unit I(c): Uninformed Search Strategies
Searching for Solution
Uninformed Search Strategies - Artificial Intelligence and Machine Learning
For finding the solution one can make use of explicit search tree that is generated by the initial state and the successor function that together define the state space.
Searching
for Solution
AU
Dec.-10, 14, May-14
For
finding the solution one can make use of explicit search tree that is generated
by the initial state and the successor function that together define the state
space. In general, we may have search graph rather than a search tree as the
same state can be reached from multiple paths.
"A set of all possible states for a given problem is known as
the state space of the problem".
Consider
a example of making a coffee:
If
one wants to make a cup of coffee, then state space representation of this
problem can be done as follows:
1)
Analyze the problem, i.e., verify whether the necessary ingredients like
instant coffee powder, milk powder, sugar, kettle, stove etc., are available or
not.
2)
If ingredients are available then steps to solve the problem are -
i) Boil
half cup of water in the kettle.
ii)
Take some of the boiled water in a cup add necessary amount of instant coffee
powder to make decoction.
iii)
Add milk powder to the remaining boiling water to make milk.
iv)
Mix decoction and milk.
v)
Add sufficient quantity of sugar to your taste and the coffee is ready.
3)
Now, by representing all the steps done sequentially we can make state space
representation of this problem as shown in Fig. 3.3.1.
4)
Westarted with the ingredients (initial state), followed by a sequence of steps
(called states) and at last had a cup of coffee (goal state).
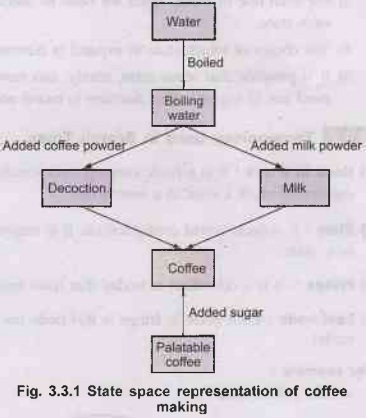
We
added only needed amount of coffee powder, milk powder and sugar (operators).
Thus, every AI problem has to do the process of searching for the solution
steps as they are not explicit in nature. This searching is needed for solution
steps are not known beforehand and have to be found out. Basically to do a
search process, the following are needed -
i)
The initial state description of the problem.
ii) A
set of legal operators that changes the state.
iii)
The final or the goal state.
Given
these, searching can be defined, as a sequence of steps that transforms the
initial state to the goal state. In other words, we can say that a problem can
be defined as a state space search.
Construction of State Space
1)
The root of search tree is a search node corresponding to initial state. In
this state only we can check if goal is reached.
2)
If goal is not reached we need to consider another state. Such a can be done by
to expanding from the current state by applying successor function which
generates new state. From this we may get multiple states.
3)
For each one of these, again we need to check goal test or else repeat
expansion of each state.
4)
The choice of which state to expand is determined by the search strategy.
5)
It is possible that some state, surely, can never lead to goal state. Such a
state we need not to expand. This decision is based on various conditions of
the problem.
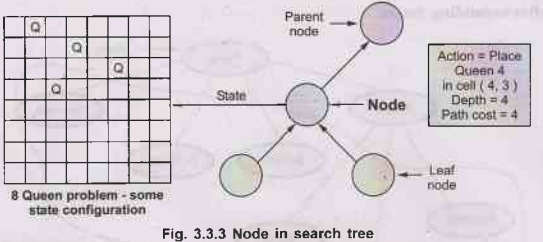
Terminology used in Search Trees
1)
Node in a tree: It is a book keeping data
structure to represent the structure configuration of a state in a search tree.
2)
State: It reflects world configuration. It is
mapping of state and action to another new state.
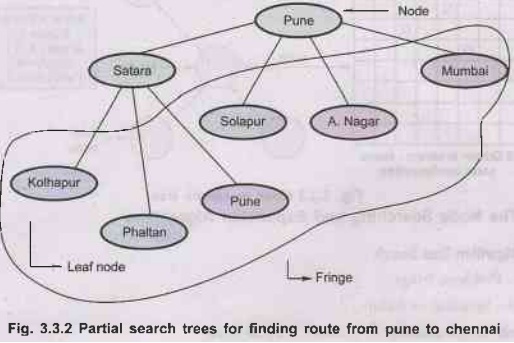
3)
Fringe: It is a collection of nodes that have
been generated but not yet expanded.
4)
Leaf node: Each node in fringe is leaf node (as it
does not have further successor node).
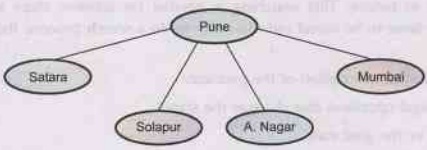
For
example:
a)
The initial state
b)
After expanding Pune
c)
After expanding Satara
5)
Search strategy: It is a function that
selects the next node to be expanded from current fringe. Strategy looks for
best node for further expansion.
For
finding best node each node needs to be examined. If fringe has many nodes then
it would be computationally expensive.
The
collection of un-expanded nodes (fringe) is implemented as queue, provided
with, the sets of operations to work with queue. These operations can be CREATE
Queue, INSERT in Queue, DELETE from Queue and all necessary operations which
can be used for general tree-search algorithm.
Node Representation in a Search-Tree
Formally
we can represent the node of search tree with 5 components,
1)
State: The state, in the state space to which
the node corresponds;
2)
Parent-node: The node in the search tree
that generated this node;
3)
Action: The action that was applied to the
parent to generate the node;
4)
Path-cost: The cost, traditionally denoted by
function g(n), of the path, from the initial state to the node, as indicated by
the parent pointers;
5)
Depth: The number of steps along the path from
the initial state.
The Node Searching and Expansion Algorithms
1. Algorithm Tree Search
Input
- Problem, fringe.
Output
- Solution or failure.
1)
Create initial node from problem's initial state.
2)
Create fringe from initial node.
3)
If fringe is empty return failure.
4)
Node = first_node from_fringe.
5)
If Goal test succeeds on node then return solution (node).
6)
Expand node and add the newly generated nodes to fringe.
7)
Repeat step (3) to (6).
2. Algorithm Expand Node
/*
This algorithm will be used in Tree search for expanding the node */
Input
Node, problem
Output
- A set of nodes (newly generated) (successor)
1) Initial
successor set is empty.
2) For
each <action, result>,
in
successor function of a problem for a given state do steps (3) to (9).
3) s
= a new node.
4) STATE
[s] = result.
5) Parent
Node [s] = node.
6) Action
[s] = action.
7) Path
Cost [s] = PathCost [node] + StepCost (node, action s).
8) Depth
[s] = Depth [node] + 1.
9) Add
s to successor set.
10)
Return successor set.
Measuring Problem Solving Performance
When
we are solving a problem we have three possible outcomes 1) We reach at failure
state 2) Solution state 3) Algorithm might get stuck in an infinite loop.
Problem
solving algorithm's performance can be evaluated on the basis 4 factors-
1)
Completeness:
Does
the algorithm surely finds a solution, if really the solution exists.
2)
Optimality:
Some
times it happens that there are multiple solutions to a single problem. But the
algorithm is expected to produce best solution among all feasible solution,
which is called as optimal solution.
3)
Time complexity: How much time the algorithm
takes to find the solution.
4)
Space complexity: How much memory is required
to perform the search algorithm.
•
Major factors affecting time complexity and space
complexity.
•
Time and space complexity are majorly affected by the
size of the state space graph, because it is the input to the algorithm. State
space graph needs to be stored as well as it needs to be processed. So it is
straight forward that more complex state space graph more is the space and time
required.
•
The state space graphs complexity is affected by 3
factors-
a)
Branching factor:
It
is maximum number of successors of any node. If this value is less then less
nodes will have to be search, there by getting result fast.
b)
Depth of goal node:
It
is the depth of the shallowest goal node, where one can reach fast. If this
value is small we will get goal node early.
c)
Maximum length of path:
It
is maximum length of any path in the state space. If length value is more,
complexity of state space is more. This is often measured in terms of number of
nodes generated.
The
major activity in searching is node expansion. The time taken for this is
called as search cost. Search cost will typically depend on time complexity.
•
Path cost:
Is
time bound cost which is incurred for reaching or going to a particular node.
The
total cost for algorithm is the combined cost of search cost and the path cost
of the solution found along with memory usage.
Total
cost = Search cost + Path cost + Memory usage.
For
the problem of finding a route from Pune to Chennai, the search cost is amount
of time taken by the search and the solution cost is the total length of the
path.
Artificial Intelligence and Machine Learning: Unit I(c): Uninformed Search Strategies : Tag: : Uninformed Search Strategies - Artificial Intelligence and Machine Learning - Searching for Solution
Related Topics
Related Subjects

Artificial Intelligence and Machine Learning
CS3491 4th Semester CSE/ECE Dept | 2021 Regulation | 4th Semester CSE/ECE Dept 2021 Regulation