Digital Principles and Computer Organization: Unit IV: Processor
Microprogrammed Control
Processor - Digital Principles and Computer Organization
Every instruction in a processor is implemented by a sequence of one or more sets of concurrent microoperations. Each microoperation is associated with a specific set of control lines which, when activated, causes that microoperation to take place.
Microprogrammed Control
• Every instruction in a processor is
implemented by a sequence of one or more sets of concurrent microoperations.
Each microoperation is associated with a specific set of control lines which,
when activated, causes that microoperation to take place.
• Since the number of instructions and
control lines is often in the hundreds, the complexity of hardwired control
unit is very high. Thus, it is costly and difficult to design.
• Further more, the hardwired control
unit is relatively inflexible because it is difficult to change the design, if
one wishes to correct design error or modify the instruction set.
• Microprogramming is a method of
control unit design in which the control signal selection and sequencing
information is stored in a ROM or RAM called a control memory CM. The control
signals to be activated at any time are specified by a microinstruction, which
is fetched from CM in much similar way an instruction is fetched from main
memory.
• Each microinstruction also explicitly
or implicitly specifies the next microinstruction to be used, thereby providing
the necessary information for sequencing.
• A sequence of one or more
microoperations designed to control specific operation, such as addition,
multiplication is called a microprogram. The microprograms for all instructions
are stored in the control memory.
• The address where these
microinstructions are stored in CM is generated by microprogram
sequencer/microprogram controller. The microprogram sequencer generates the
address for microinstruction according to the instruction stored in the IR.
• Fig. 7.6.1 shows the microprogrammed
control unit. It consists of control memory, control address register, micro
instruction register and microprogram sequencer.

• The components of control unit work
together as follows:
• The control address register (µpc)
holds the address of the next microinstruction to be read. Every time a new
instruction is loaded into the IR, the output of the block labeled
"starting address generator" is loaded into the µpc.
• When address is available in control
address register, the sequencer issues READ command to the control memory.
• After issue of READ command, the word
from the addressed location is read into the microinstruction register.
• The µpc is then automatically
incremented by the clock, causing successive microinstructions to be read from
the control memory.
• The content of the micro instruction
register generates control signals which are delivered to various parts of the
processor in the correct sequence.
• Number of times the control unit is
required to check the status of the condition codes or external inputs to
choose between alternative courses of action.
• In such situation, microprogrammed
control use conditional branch microinstructions. In additions to the branch
address, these instructions specify which of the external inputs, condition
codes, or, possibly bits of the instruction register should be checked as a
condition for branching to take place.
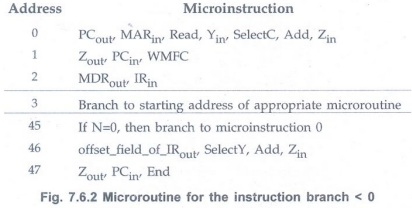
• Let us see the implementation of
instruction Branch < 0, as shown in Fig. 7.6.2. When this instruction is loaded
into IR, a branch microinstruction transfers control to the corresponding
microroutine, which is assumed to start at location 45 in the control memory.
This address is the output of the starting address generator block in Fig.
7.6.1.
• The microinstruction at location 45
tests the N bit of the condition codes. If this bit is equal to 0, a branch
takes place to location 0 to fetch a new machine instruction. Otherwise, the
microinstruction at location 46 is executed to put the branch target address
into register Z. The microinstruction in location 47 loads this address into
the PC.
• To support microprogram branching, the
starting address and branch address generator block loads a new address into
the upc when a microinstruction instructs it to do so.
• To allow implementation of conditional
branch, the external inputs, condition codes and the contents of IR are given
to the starting address and branch address generator block.
• Let us see how the upc is used at
different situations.
1.When a new instruction is loaded into
the IR, the upc is loaded with the starting address of the microroutine for
that instruction.
2. When a Branch microinstruction is
encountered and the branch condition is satisfied, the upc is loaded with the
branch address.
3. When the End instruction is
encountered, the upc is loaded with the address of the first Control Word (CW)
in the microroutine for the instruction fetch cycle, i.e. address 0.
4. In any other situation, the upc is
incremented microinstruction is fetched from the control memory.
Advantages of Microprogrammed Control
• It simplifies the design of control
unit. Thus it is both, cheaper and less error prone to implement.
• Control functions are implemented in
software rather than hardware.
• The design process is orderly and
systematic.
• More flexible, can be changed to
accommodate new system specifications or to correct the design errors quickly
and cheaply.
• Complex function such as floating point
arithmetic can be realised efficiently.
• The new or modified instruction set of
CPU can be easily implemented by simply rewriting or modifying the contents of
control memory.
• The fault can be easily diagnosed in
the micro-program control unit using diagnostics tools by maintaining the
contents of flags, registers and counters.
Disadvantages of Microprogrammed Control
• A microprogrammed control unit is
somewhat slower than the hardwired control unit, because time is required to
access the microinstructions from CM.
• The flexibility is achieved at some
extra hardware cost due to the control memory and its access circuitry.
• The design duration of micro-program
control unit is more than hardwired control unit for smaller CPU.
Besides these disadvantages, the
microprogramming is the dominant technique for implementing control units.
Example 7.6.1
Write a combined micro routine that can implement that BGT (Branch if > 0),
BPL (Branch if plus), and BR (Branch Unconditionally) instructions. The branch
conditions, for the BGT and BPL instructions are Z + (N XOR V) = 0 and N = 0,
respectively. What is the total number of micro instructions required? How many
micro instructions are needed if a separate micro routine is used for each
machine instruction?
Solution: For
bus organisation, we write microroutine for the implementation of BGT (Branch
if > 0), BPL (Branch if plus) and BR (Branch unconditionally) instructions
as follows.
Combine Microroutine
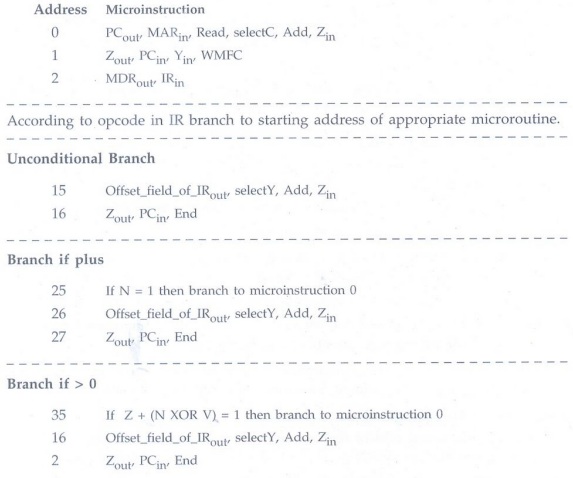
• The first three microinstructions in
the combine microroutine are used to fetch the opcode. The total number of
microinstructions required are 11. If a separate microroutine is used for each
machine instruction 17 microinstructions are needed.
Microinstruction
• A simple way to structure
microinstructions is to assign one bit position to each control signal required
in the CPU. However, this scheme has one serious drawback-assigning individual
bits to each control signal results in long microinstructions, because the
number of required signals is usually large. Moreover, only a few bits are used
in any given instruction. The solution of this problem is to group the control signals.
Grouping of
Control Signals
• Grouping technique is used to reduce
the number of bits in the microinstruction. This technique is explained in the
following section.
• Let us consider single bus CPU having
different control signals, as shown in Fig. 7.6.3.
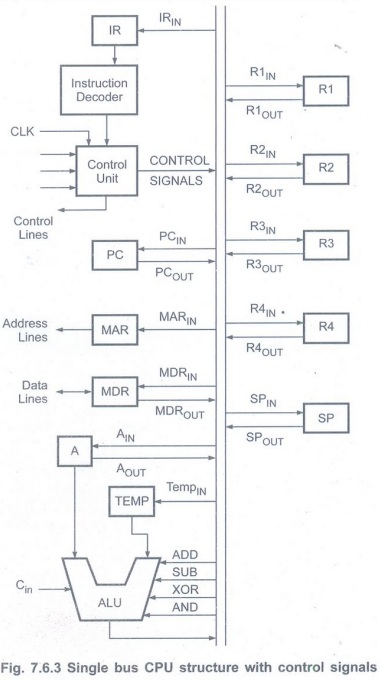
• Gating signals: (IN and OUT
Signals).
• Control signals:
Read, write, clear A, set carry in, continue operation, WMFC, end, etc.
• ALU Signals :Add,
sub, etc. There are in all 39 signals and hence each microinstruction will have
39 bits. It is not at all necessary to use all 39 bits for every
microinstruction because by using grouping of control signals we minimize
number of bits for microinstruction.
Ways to reduce number of bits in
microinstruction
1. Most signals are not needed
simultaneously.
2. Many signals are mutually exclusive
e.g. Only one function of ALU can be activated at a time.
3. A source for data transfers must be
unique which means that it should not be possible to get the contents of two
different registers on to the bus at the same
time.
4. Read and write signals to the memory
can't be activated simultaneously.
• This suggests the possibility of
grouping the control signals so that all the signals that are mutually
exclusive are placed in the same group. Thus a group can specify one
microinstruction at a time. So with this suggestions 39 control signals can be
grouped in 8 different groups.
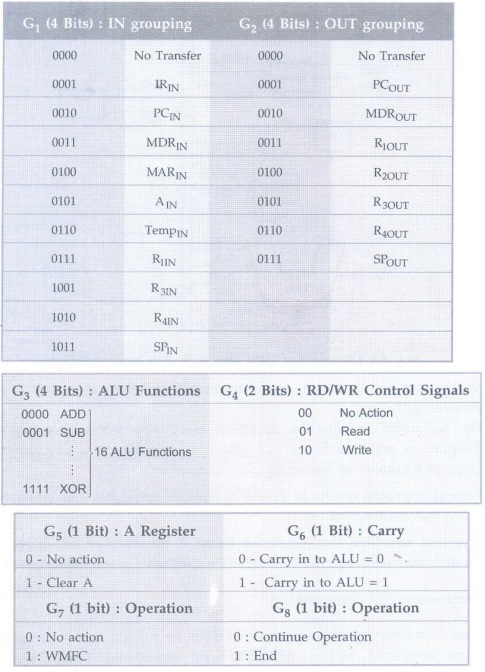
• The total number of grouping bits are
18. Therefore, we minimized 39 bits microinstruction to 18 bit microinstruction.
• Grouping of control signals result in
relatively small increase in the required hardware as it becomes necessary to
use decoding circuits to translate the bit patterns of each group into actual
control signals.
• Since the number of bits required is
less for microinstruction, less space is required for microinstructions for the
instruction.
Techniques of
Grouping of Control Signals
• The grouping of control signals can be
done either by using technique called vertical organisation or by using
technique called horizontal organisation.
• Highly encoded scheme that use compact
codes to specify only a small number of control functions in each
microinstruction are referred to as a vertical organisation.
• On the other hand, the minimally
encoded scheme, in which resources can be controlled with a single instruction,
is called a horizontal organisation.
• Table 7.6.1 shows the comparison
between horizontal and vertical organisation.

• The advantages and disadvantages of
horizontal and vertical organisations can be summarized as follows:
1. The horizontal organisation approach
is suitable when operating speed of computer is a critical factor and where the
machine structure allows parallel usage of a number of resources.
2. Vertical approach results in slower
operations speed but less bits are required in the microinstruction.
3. In vertical approach the significant
factor is the reduced requirement for the parallel hardware required to handle
the execution of microinstructions.
Microinstruction Sequencing
• The task of microprogram sequencing is
done by microprogram sequencer. There two important factors that must be
considered while designing the microprogram sequencer :
• The size of the microinstruction and
• The address generation time
• The size of the microinstruction should
be minimum so that the size of control memory required to store
microinstructions is also less. This reduces the cost of control memory. With
less address generation time, microinstructions can be executed in less time,
resulting better throughout.
• During execution of a microprogram, the
address of the next microinstruction to be executed has three sources:
• Determined by instruction register
• Next sequential address
• Branch
• Out of these three address sources,
first occurs only once per instruction cycle. The second source is most
commonly used. However, if we store separate microinstructions for each machine
instruction, there will be large number of microinstructions. As a result,
large space in CM is required to store these microinstructions.
• We know that, machine instructions
involve several addressing modes and there can be many instructions and
addressing mode combinations.
• A separate microinstructions for each
of these combinations would produce considerable duplication of common
microinstructions.
• We want to organize the microprograms such that they share as many microinstructions as possible. This requires many branch microinstructions, both and conditional tounconditional transfer control amongst the various microinstructions. Thus it is important to design compact, time-efficient techniques for microinstruction branching.
• Let us see how microinstructions can be
shared using microinstruction branching. Consider instruction ADD Rsrc/ Rdst.
The instruction adds the source operand to the contents of register Rdst and
places the sum in Rdst, the destination register.
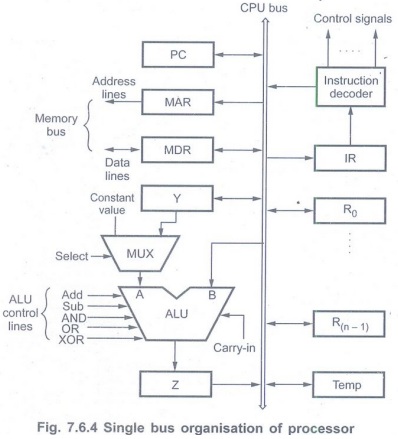
• Let us assume that the source operand
can be specified in the following addressing modes: Indexed, autoincrement,
autodecrement, register indirect and register direct. We now use this
instruction in conjunction with the CPU structure shown in Fig. 7.6.4 to
demonstrate a possible microprogrammed implementation.
• Fig. 7.6.5 shows a flowchart of a
microprogram for the ADD Rsrc, Rdst instruction. Each box in the flowchart
corresponds to a microinstruction that controls the transfers and operations
indicated within the box.
• The microinstruction is located at the
address indicated by the number above the upper right-hand corner of the box.
During the execution of the microinstruction, the branching takes place at
point A. The branching address is determined by the addressing mode used in the
instruction.
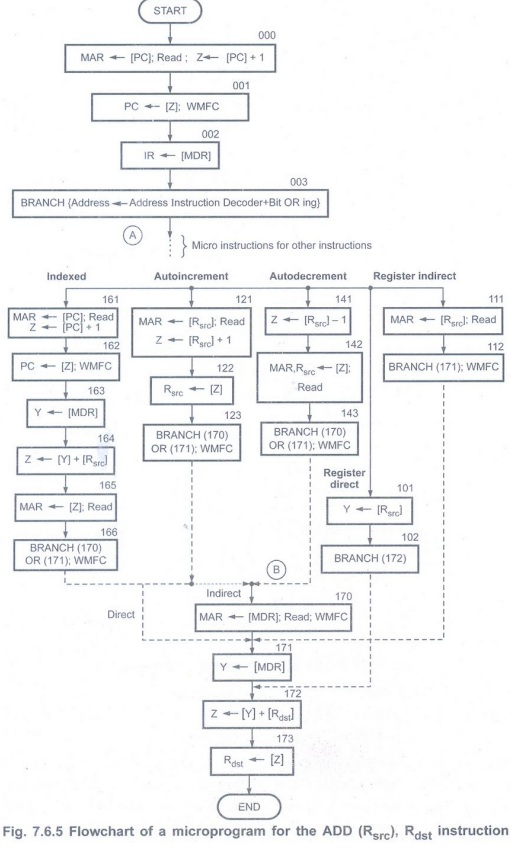
• At point B, it is necessary to choose
between actions required by direct and indirect addressing modes. If the
indirect mode is specified in the instruction, then the microinstruction in
location 170 is performed to fetch the operand from the memory. If the direct
mode is specified, this fetch must be bypassed by branching immediately to
location 171. The remaining microoperations required to complete execution of
instruction are same and hence shared by the instructions having operand with
different addressing modes.
• From the above discussion we can say that branching allows sharing of microinstructions for different microprograms and it reduces the size of control memory.
Techniques for Modification or Generation of Branch Addresses
Bit-ORing
• In this technique, the branch address
is determined by ORing particular bit or bits with the current address of the
microinstruction.
• For example, if the current address is 170 and the branch address is 172 then the branch address can be generated by ORing 02 (bit 1), with the current address.
Using Condition Variables
• In this technique the condition
variables are used to modify the contents of the CM address register directly,
thus eliminating whole or in part the need for branch addresses in
microinstructions.
• For example, let the condition variable
CY indicate occurrence of CY = 1 and no carry when CY = 0. Suppose that we want
to execute a SKIP_ON_CARRY microinstruction. This can be done by logically
connecting CY to the count enable input of upc at on appropriate point in the
microinstruction cycle. This allows the overflow condition to increment upc an
extra time, thus performing the desired skip operation.
Wide-Branch Addressing
• Generating branch addresses becomes
more difficult as the number of branches increases. In such situations
Programmable Logic Array can be used to generate the required branch addresses.
This simple and inexpensive way of generating branch addresses is known as
wide-branch addressing.
• Here, the opcode of a machine
instruction is translated into the starting address of the corresponding
micro-routine. This is achieved by connecting the opcode bits of the
instruction register as inputs to the PLA, which acts as a decoder. The output
of the PLA is the address of the desired microroutine.
Example 7.6.1
For a single bus organisation of CPU, write a microprogram for instruction. Add(Rsrc)+,
Rdst
Solution:
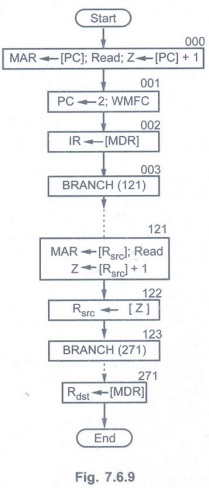
Let us examine the path needed for the flowchart in 7.6.6 to execute the
instruction Add(Rsrc)+, Rdst.
In this instruction the source operand
is accessed in the autoincrement mode and the Rsrc and Rdst are general purpose
registers in the processor. We assume that the processor has 16 registers that
can be used for addressing purpose, each specified using a 4-bit code. We also
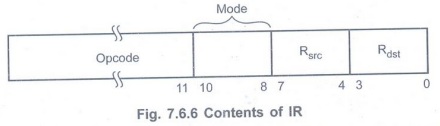
assume that the instruction has a 3-bit field, (bits 8-10) used to specify the
addressing mode for the source operand, as shown in Fig. 7.6.6. Bit patterns
11,10,01 and 00 located in bits 10 and 9 denote the indexed, autodecrement,
autoincrement and register modes respectively. For each of these modes bit-8 is
used to specify the indirect version. For example, 100 in the mode field
specifies the direct version of the autodecrement mode, whereas 101 specifies
the indirect version.
As a part of execution, first the opcode
and mode fields are decoded to determine that an Rsrc or Rdst
register is involved. The decoded output is then used to gate the contents of
the Rsrcor Rdst fields in the IR into a second decoder,
which produces the gating signals for the actual registers R0 to R15.
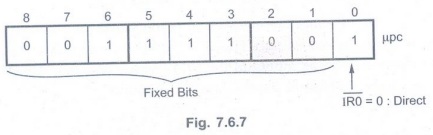
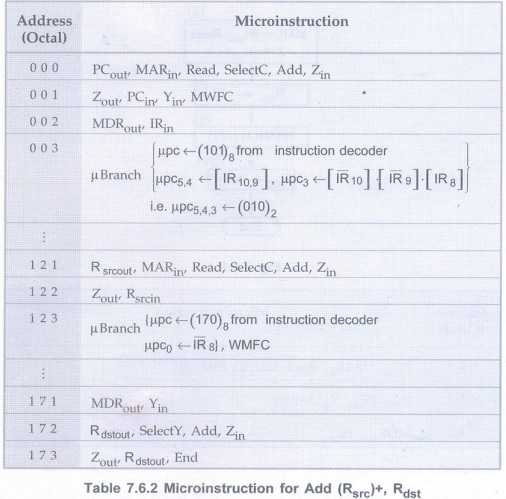
The flowchart of a microprogram for the ADD Rsrc, Rdst instruction in Fig. 7.6.5 is drawn by combining the microroutines for all possible values of the mode field, resulting in a structure that requires many branch points. The instruction Add(Rsrc)+, Rdst requires two branch microinstructions. In each branch microinstruction, the expression in brackets indicates the branch address that is to be loaded into the upc and how this address is modified using the bit-ORing scheme. For example, the branch instruction at location 123 modifies the branch address 170 to 171 by ORing the bit-8 in the IR with bit upc0 to change the addressing mode from indirect to direct, as shown in Fig. 7.6.7.
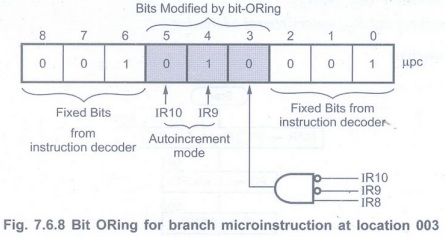
The address for branch microinstruction
at location 003 is generated as shown in Fig. 7.6.8.
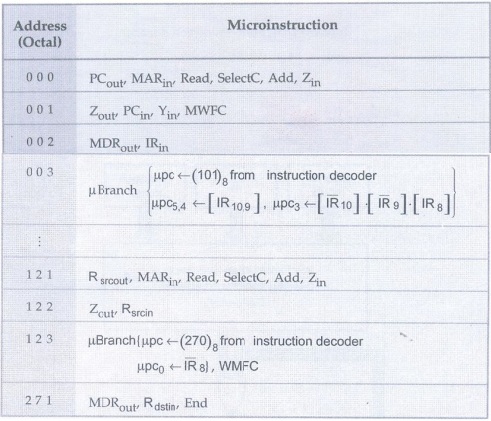
The Table 7.6.2 gives the
microinstruction sequence for the execution of Add(Rsrc)+, Rdstinstruction.
Example 7.6.2
For a single bus organisation of data paths inside the CPU, write a
microprogram of micro-instructions and draw chart of a microprogram for the
following instruction. MOV (Rsrc)+, Rdst.
Rsrc uses direct and Rdst
autoincrement addressing.
Solution : Flowchart
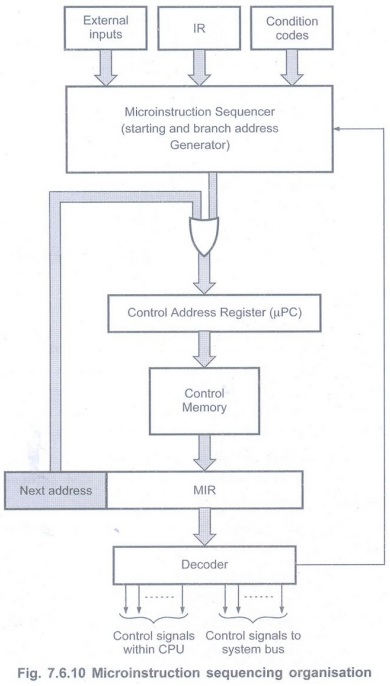
Microinstructions with Next Address Field
• We have seen that in Fig. 7.6.5
requires several branch microinstructions. These microinstructions perform no
useful operation in the datapath; they are needed only to determine the address
of the next instruction. Thus they reduce the operating speed of the processor.
This situation can become significantly worse when other microroutines are
considered. This problem is solved by providing special address field for
branch addresses as shown in Fig. 7.6.10.
• Here, the branch address is stored in
the special address field within the microinstruction. The branch address is
loaded in CM address register when a branch condition is satisfied.
• The special address field within the
microinstruction increases the size of the microinstruction.
• The size of the microinstruction can
be reduced by storing part of the address (low order bits) in the
microinstruction. This restricts the range of branch instructions to a small
region of the CM and may therefore increase the difficulty of writing some
microprograms.
Microinstruction Execution
• A microprogrammed computer has two
distinct levels of control.
i) The instruction level and ii) The
microinstruction level.
• At the instruction level, the CPU
continuously executes instruction cycles that involve the following steps.
1. The CPU fetches an instruction from
main memory, whose address is stored in the program counter PC.
2. The opcode part of I is placed in an
instruction register IR, the operation specified by IR is then decoded and
executed.
3. PC is altered to point to the next
instruction to be fetched from M.
• A similar sequence of operations takes
place at the lower microinstruction level, where the control-unit continuously
executes microinstruction cycles as follows:
1. The addressing portion (microprogram
sequencer) of the control-unit fetches a microinstruction MI from the control
memory CM, whose address is stored in the microprogram counter upc.
2.MI is loaded into the microinstruction
register MIR and is decoded to produce the required control signals.
3. upc is altered to point the next
microinstruction to be fetched from CM.
• A microinstruction cycle can be
executed faster than an instruction cycle, since microinstructions are stored
within the CPU, whereas instructions must be fetched from an external memory.
Microinstructions also normally require less decoding than instructions.
Review Questions
1. What modification is required in the
basic organization to support microprogram branching?
2. Explain the basic concept of
microprogrammed control.
3. Describe the organization of
microprogrammed control unit.
4. State the advantages and
disadvantages of microprogrammed control.
5. Show the control sequences for
execution of Add (R3), R1 and explain.
6. Explain microinstruction sequencing
with next address field.
7. List out the advantages and
limitations of a hard wired control unit. Explain the organization of a micro
programmed control unit.
Digital Principles and Computer Organization: Unit IV: Processor : Tag: : Processor - Digital Principles and Computer Organization - Microprogrammed Control
Related Topics
Related Subjects
Digital Principles and Computer Organization
CS3351 3rd Semester CSE Dept | 2021 Regulation | 3rd Semester CSE Dept 2021 Regulation