Artificial Intelligence and Machine Learning: Unit I(d): Heuristic Search Strategies - Local Search and Optimization Problems
Local Search and Optimization Problems
Heuristic Search Strategies - Local Search and Optimization Problems - Artificial Intelligence and Machine Learning
The search algorithms we have seen so far, more often concentrate on path through which the goal is reached. But if the problem does not demand the path of the solution
Local
Search and Optimization Problems
• The search algorithms we have seen so far, more often
concentrate on path through which the goal is reached. But if the problem does
not demand the path of the solution and it expects only the final configuration
of the solution then we have different types of problem to solve.
• Following are the problems where only solution state
configuration is important and not the path which has arrived at solution.
1) 8-queen (where only solution state configuration is
expected).
2) Integrated circuit design.
3) Factory-floor layout.
4) Job-shop scheduling.
5) Automatic programming.
6) Telecommunication network optimization.
7) Vehicle routing.
8) Portfolio management.
If
we have such type of problem then we can have another class of algorithms, the
algorithms that do not worry about the paths at all. These are local search
algorithms.
Local Search Algorithms
-
They operate using single state. (rather than multiple paths).
-
They generally move to neighbours of the current state.
-
There is no such requirement of maintaining paths in memory.
-
They are not "Systematic" algorithm procedure.
-
The main advantages of local search algorithm are
1)
They use very little and constant amount of memory.
2)
They have ability to find resonable solution for infinite state spaces (for
which systematic algorithms are unsuitable).
Local
search algorithms are useful for solving pure optimization problems. In pure
optimization problems main aim is to find the best state according to required
objective function.
Local
search algorithm make use of concept called as state space landscape. This
landscape has two structures -
1)
Location (defined by the state)
2)
Elevation (defined by the value of the heuristic cost function or objective
function).
• If elevation corresponds to the cost, then the aim is to find
the lowest valley - (a global minimum).
• If elevation corresponds to the objective function then aim
is to find the highest peak - (a global maximum).
• Local search algorithms explore the landscape.
Performance
measurement
- Local search is complete i.e. it surely finds goal if one
exists.
- Local search is optimal as it always find global minimum or
maximum.
Local
search representation

Hill Climbing Search
• This algorithm generally moves up in the direction of
increasing value that is-uphill. It breaks its "moving up loop"
when it reaches a "peak" where no neighbour has a higher value.
• It does not maintain a search tree. It stores current node
data structure. This node records the state and its objective function value.
Algorithm only look out for immediate neighbours of current state.
• It is similar to greedy local search in a sense that it considers
a current good neighbour state without thinking ahead.
• Greedy algorithm works very well as it is very easy to
improve bad state in hill climbing.
1. Algorithm for Hill Climbing
The
algorithm for hill climbing is as follows: -
1)
Evaluate the initial state. If it is goal state quit, otherwise make current
state as initial state.
2)
Select a new operator that could be applied to this state and generate a new
state.
3)
Evaluate the new state. If this new state is closer to the goal state than
current state make the new state as the current state. If it is not better,
ignore this state and proceed with the current state.
4)
If the current state is goal state or no new operators are available, quit.
Otherwise repeat from 2.
2. Problems with Hill Climbing
1)
Local maxima - Can't see higher peak.
2)
Shoulder - Can't see the way out.

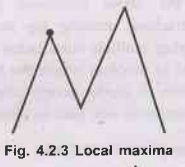
Local
maxima- It is a state where we have climbed to
the top of the hill, and missed on better solution.
It
is the mountain - A state that is better than
all of its neighbours, but not better than some other states further away.
[Shown in Fig. 4.2.3]
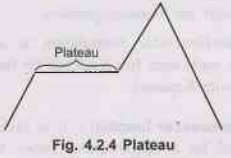
Plateau: It is a state where everything around is about as good as where
we are currently. In other words a flat area of the search space in which all
neighbouring states have the same value. [Shown in Fig. 4.2.4]
Ridges: In this state we are on a ridge leading up, but we can't directly
apply an operator to improve the situation, so we have to apply more than one
operator to get there. [Shown in Fig. 4.2.5]
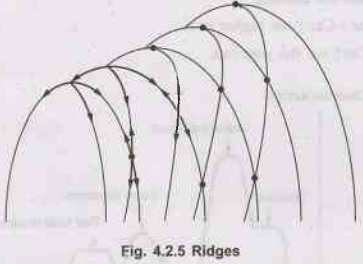
Illustration
of ridges: The grid of states (dark circles) is
superimposed on a ridge rising from left to right, creating a sequences of
local maxima that are not directly connected to each other. From each local
maximum all the available actions point downhill.
3. Solving Problems
Associated with Hill Climbing
• All the above discussed problems could be solved using
methods like backtracking, making big jumps (to handle plateaus or poor local
maxima), applying multiple rules before testing (helps with ridges) etc. Hill
climbing is best suited to problem where the heuristic gradually improves, the
closer it gets to the solution; it works poorly where there are sharp drop-offs.
It assumes that local improvement will lead to global improvement.
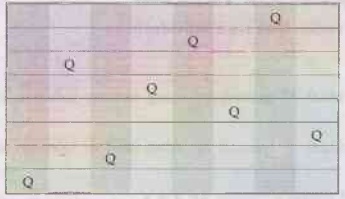
4. Example for Local Search
Consider
the 8-queens problem:
A
complete-state formulation is used for local search algorithms. In 8-queens
problem, each state has 8-queens on the board one per column. There are two
functions related with 8-queens.
1)
The successor function: It is function which
returns all possible states which are generated by a single queen move to
another cell in the same column. The total successor of the each state 8 x 7 =
56.
2)
The heuristic cost function: It is a
function 'h' which hold the number of attacking pair of queens to each other
either directly or indirectly. The value is zero for the global minimum of the
function which occurs only at perfect solutions.
5. Advantages of Hill Climbing
-
Hill climbing is an optimization technique for solving computationally hard
problems.
- It
is best used in problems with the property that the" state description
itself contains all the information needed for a solution".
-
The algorithm is memory efficient since it does not maintain a search tree. It
looks only at the current state and immediate future states.
- In
contrast with other iterative improvement algorithms, hill-climbing always
attempts to make changes that improve the current state. In other words,
hill-climbing can only advance if there is a higher point in the adjacent
landscape.
- It
is often useful when combined with other methods, getting it started right in
the as immediate general neighbourhood.
6. Variations of Hill Climbing
Many
variants of hill-climbing have been invented as discussed below.
1)
Stochastic hill climbing: Chooses at random from
among the uphill moves; the probability of selections can vary with the
steepness of the uphill move.
2)
First choice hill climbing: Implements stochastic
hill climbing by generating successors randomly until one is generated that is
better than the current state. This is a good strategy when a state has many
(e.g. thousands) of successors.
3)
Random restart hill climbing: Adopts the
well known saying "If at first you don't succeed, try, try again". It
conducts a series of hill climbing searches from randomly generated initial
states, stopping when a goal is found.
The
hill climbing algorithms described so far are incomplete because they often
fail to find a goal when surely goal exist. This can happen because these
algorithms can get stuck on local maxima. Random restart hill is complete with
probability approaching to 1. This algorithm do not stop until it reaches to
goal.
The
success of hill climbing depends very much on the shape of the state-space
landscape. If there are few local maxima and plateaux, random-restart hill
climbing will find a good solution very quickly.
4)
Steepest ascent hill climbing: This
algorithm differs from the basic Hill climbing algorithm by choosing the best
successor rather than the first successor that is better. This indicates that
it has elements of the breadth first algorithm.
Steepest
ascent Hill climbing algorithm
1. Evaluate
the initial state.
2.
If it is goal state then quit otherwise make the current state this initial
state and proceed;
3.
Repeat set target to be the state that any successor of the current state can
better; for each operator that can be applied to the current state apply the
new operator and create a new state evaluate this state.
4.
If this state is goal state Then quit. Otherwise compare with Target. If better
set Target to this value. If Target is better than current state set current
state to Target. Until a solution is found or current state does not change.
Both
the basic and this method of hill climbing may fail to find a solution by
reaching a state from which no subsequent improvement can be made and this
state is not the solution.
Local
maximum state is a state which is better than its neighbours but is not better
than states faraway. These are often known as foothills. Plateau states are
states which have approximately the same value and it is not clear in which
direction to move in order to reach the solution. Ridge states are special
types of local maximum states. The surrounding area is basically unfriendly and
makes it difficult to escape from, in single steps, and so the path peters out
when surrounded by ridges. Escape relies on: backtracking to a previous good
state and proceed in a completely different direction-involves keeping records
of the current path from the outset; making a gigantic leap forward to a
different part of the search space perhaps by applying a sensible small step repeatedly,
good for plateau; applying more than one rule at a time before testing, good
for ridges. None of these escape strategies can guarantee success.
Simulated Annealing Search
1)
In simulated annealing, initially the whole space is explored.
2) This
is a variation of hill climbing.
3)
This avoids the danger of being caught on a plateau or ridge and makes the
procedure less sensitive to the starting point.
4)
Simulated annealing is done to include a general survey of the scene, to avoid
climbing, false foot hills.
5)There
are two additional changes -
i)
Rather than creating maxima, minimisation is done.
ii)
The term objective function is used rather than heuristic.
6)
This concept is taken from physical annealing where physical substances are men
melted and then gradually cooled until some solid state is reached. In
physical annealing the goal is to produce a minimal-energy state. The annealing
schedule states, that if the temperature is lowered sufficiently slowly, then
the goal will be attained. AE is called the change in the value of the
objective function.
7)
It becomes clear that in this algorithm we have valley descending rather than
hill climbing. The probability that the metal will jump to a higher given by
P=exp8-E/kT where k is Boltzmann's constant.
The
algorithm
1)
Start with evaluating the initial state.
2)
Apply each operator and loop until a goal state is found or till no new
operators left to be applied as described below:
i)
Set T according to an annealing schedule.
ii)
Select and apply a new operator.
iii)
Evaluate the new state. If it is a goal state quit.
ΔE =
Val (current state) - Val (new state)
• If ΔE < 0 then this is the new current state.
Else
find a new current state with probability e - E / KT.
Local Beam Search
1)
In the local beam search, instead of single state in the memory k states are
kept in the memory.
2)
In local beam search states are generated in random fashion.
3) A
successor function plays an important role by generating successor of all
K states.
4)
If any one successor state is goal then no further processing is required.
5)
In other case i.e. if goal is not achieved, it observes the K best successors
from the list of all successor and process is repeated.
6)
At first glance the random parallism is achieved in the sequence by a local
beam search with K states.
7)
In a random-restart search every single search activity run independently of
others.
8)
To implement local search, threads are used. The K parallel search threads
useful information.
9)
The algorithm work on principle of successful successors. If one state generate
efficient/goal reaching successor and other K-1 state generate poor successor,
then in this situation the successful successors leads all other states.
10)
The algorithm drops/leaves the unsuccessful search and concentrate on
successful search.
Limitations
of local beam search
1)
The local beam search has limitation of, lack of variation among the K states.
2)
If the state concentrate on small area of state space then search becomes more
expensive.
Stochastic Beam Search
1)
Its one of the flavour of local beam search, which is very similar to that of
stochastic hill climbing.
2)
It resolves the limitation of local beam search.
3)
Stochastic beam search concentrate on random selection of K successor instead
of selecting k best successor from candidate successor.
4)
The probability of random selection is increasing function of its success rate.
5) A
stochastic beam search is very similar to natural selection, where the child
(successor) of a parent state is eugenic (good production) according to its
success rate (fitness). Thus the next generation is also very much powerful.
Genetic Algorithms
1)
Evolutionary pace of learning algorithm is genetic algorithm. The higher degree
of eugency can be achieved with new paradigm of AI called a genetic algorithms.
2) A
genetic algorithm is a rich flavour of stochastic beam search.
3)
In the genetic algorithm two parent states are combined together by which a
good successor state is generated.
4)
The analogy to natural selection is the same as in stochastic beam search,
except now we are dealing with sexual rather than asexual reproduction.
1. Term used in Genetic Algorithm
1)
Population: Population is set of states
which are generated randomly.
2)
Individual: It is a state or individual
and it is represented as string over a finite alphabet.
Example
- A string of 0s and 1s.
For
example - In 8-queen all states are specified with the position of 8-queens.
The memory required is
8×log2
8 = 24 bits. Each state is represented with 8 digits.
3)
Fitness function: It is a evaluation
function. On its basis each state is rated. A fitness function should return
higher values for better states. For the state, the probability of being chosen
for reproducing is directly proportional to the fitness score.
In
8-queen problem the fitness function has 28 value for number of non attacking
pairs.
4)
Crossover: Selection of state is
dependent on fitness function. If fitness function value is above threshold
then only state is selected otherwise discarded. For each state, pairs are
divided, that division point or meeting point is called crossover point, which
is chosen in random order from the positions in the string.
5)
Mutation: Mutation is one of the generic
operator. Mutation works on random selections or changes. For example mutation
select and changes a single bit of pattern switching 0 to 1 or 1 to #.
6)
Schema: The schema is a substring in which
position of some bit can be unspecified.
2. Working of a Genetic Algorithm
Input:
1) State population (a set of individuals)
2) Fitness function (that rates individual).
Steps
1)
Create an individual 'X' (parent) by using random selection with fitness
function 'A' of 'X'.
2)
Create an individual 'Y' (parent) by using random selection with fitness
function'B' of 'Y'.
3)
Child with good fitness is created for X + Y.
4)
For small probability apply mutate operator on child.
5)
Add child to new population.
6)
The above process is repeated until child (an individual) is not fit as
specified by fitness function.
Genetic
algorithm example
Example:
8-queens problem states.
States:
Assume
each queen has its own column, represent a state by listing a row where the
queen is in each column (digits 1 to 8)
For
example, the state below will be represented as 16257483.
3. Example: 8 Queens Problem Fitness
Fitness
function: Instead of h as before, use the number
of non-attacking pairs of queens. There are 28 pairs of different queens,
smaller column first, all together, so solutions have fitness 28. (Basically,
fitness function is 28 - h)
For
example, fitness of the state below is 27 (queens in columns 4 and 7 attack
each other).
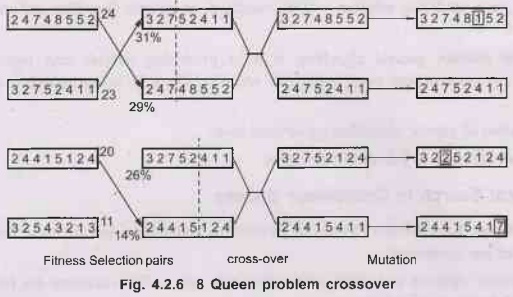
Example:
8 queens problem crossover.
Choose
pairs for reproduction (so that those with higher fitness are more likely to be
chosen, perhaps multiple times).
For
each pair, choose a random crossover point between 1 to 8, say 3.
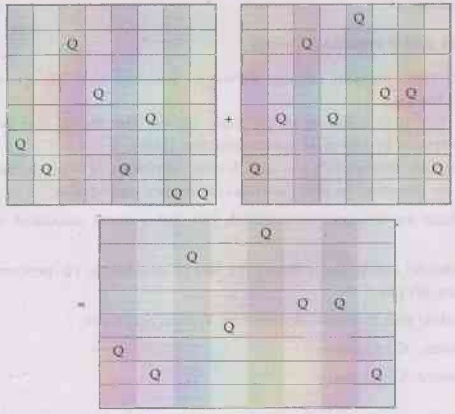
Produce
offspring by taking substring 1-3 from the first parent and 4 - 8 from the second
(and vice versa). Apply mutation (with small probability) to the offspring.
Importance
of representation
Parts
we swap in crossover should result in a well-informed solution (and in addition
better be meaningful).
Consider
what would happen with binary representation (where position requires 3
digits).
Also
chosen representation reduces search space considerably (compared to
representing each square for example).
4. Optimization using Genetic Algorithm
1)
Genetic algorithm is biological model of intelligent evolution. It generates
the population of competing children.
2)
The poor candidate solution will be vanished, as genetic algorithm generates
best child.
Thus,
in practice genetic algorithm is most promising survive and reproduction
technique by constructing new optimized solution. Thus it is optimization
oriented technique.
Application
of genetic algorithm on optimization.
1)
Circuit layout. 2) Job-shop scheduling.
Artificial Intelligence and Machine Learning: Unit I(d): Heuristic Search Strategies - Local Search and Optimization Problems : Tag: : Heuristic Search Strategies - Local Search and Optimization Problems - Artificial Intelligence and Machine Learning - Local Search and Optimization Problems
Related Topics
Related Subjects

Artificial Intelligence and Machine Learning
CS3491 4th Semester CSE/ECE Dept | 2021 Regulation | 4th Semester CSE/ECE Dept 2021 Regulation