Artificial Intelligence and Machine Learning: Unit II: Probabilistic Reasoning
Introduction of Probabilistic Reasoning
Probabilistic Reasoning - Artificial Intelligence and Machine Learning
A agent working in real world environment almost never has access to whole truth about its environment. Therefore, agent needs to work under uncertainity.
UNIT II
Chapter: 7: Probabilistic Reasoning
Syllabus
Introduction of Probabilistic Reasoning
AU
Dec.-13, May-14,15,18
A
agent working in real world environment almost never has access to whole truth
about its environment. Therefore, agent needs to work under uncertainity.
Earlier
agents we have seen make the epistemological commitment that either the facts
(expressed as prepositions) are true, false or else they are unknown. When an
agent knows enough facts about its environment, the logical approach enables it
to derive plans, which are guaranteed to work.
But
when agent works with uncertain knowledge then it might be impossible to
construct a complete and correct description of how its actions will work. If a
logical agent can not conclude that any perticular course of action achieves
its goal, then it will be unable to act.
The
right thing logical agent can do is, take a rational decision. The rational
decision depends on following things:
•
The relative importance of various goals.
•
The likelihood and the degree to which, goals will be
achieved.
Acting Under Uncertainty
An
agent would possess some early basic knowledge of the world (Assume that
knowledge is represented in first order logic sentence). Using first order
logic to handle real word problem domains fails for three main reasons as
discussed below:
1)
Laziness:
It
is too much work to list the complete set of antecedents or consequents needed
to ensure an exceptionless rule and too hard to use such rules.
2)
Theoretical ignorance:
A
perticular problem may not have complete theory for the domain.
3)
Practical ignorance:
Even
if all the rules are known, perticular aspects of problem are not checked yet
or some details are not considered at all (missing out the details).
The
agent's knowledge can provide it with a degree of belief with relevent
sentences. To this degree of belief probability theory is applied. Probability
assigns a numerical degree of belief between 0 and 1 to each sentence.
Probability
provides a way of summarizing the uncertainity that comes from our laziness and
ignorance.
Assigning
probability of 0 to a given sentence corresponds to an unequivocal belief
saying that sentence is false. Assigning probability of 1 corresponds to an
unequivocal belief saying that the sentence is true. Probabilities between 0
and 1 correspond to intermediate degree of belief in the truth of the sentence.
The
beliefs completely depends on percepts of agent at perticular time. These
percepts constitute the evidence on which probability assertions are based.
Assignment of probability to a proposition is analogous to saying that whether
the given logical sentence (or its negation) is entailed by the knowledge base
rather than whether it is true or not. When more sentences are added to
knowledge base the entailment keeps on changing. Similarly the probability
would also keep on changing with additional knowledge.
All
probability statements must therefore, indicate the evidence with respect to
which the probability is being assessed. As the agent receives new percepts,
its probability assessments are updated to reflect the new evidence. Before the
evidence is obtained, we talk about prior or unconditional probability; after
the evidence is obtained, we talk about posterior or conditional probability.
In most cases, an agent will have some evidence from its percepts and will be
interested in computing the posterior probabilities of the outcomes it cares
about.
Uncertainty
and rational decisions:
The
presence of uncertainty drastically changes the way an agent makes decision. At
perticular time an agent can have various available decisions, from which it
has to make a choice. To make such choices an agent must have a preferences
between the different possible outcomes, of the various plans.
A
perticular outcome is completely specified state, along with the expected
factors related with the outcome.
For
example: Consider a car driving agent who wants
to reach at airport by a specific time say at 7.30 pm.
Here
factors like, whether agent arrived at airport on time, what is the length of
waiting duration at the airport are attached with the outcome.
Utility Theory
Utility
theory is used to represent and reason with preferences. The term utility in
current context is used as "quality of being useful".
Utility
theory says that every state has a degree of usefulness called as utility. The
agent will prefer the states with higher utility.
The
utility of the state is relative to the agent for which utility function is
calculated on the basis of agent's preferences.
For
example: The pay off functions for games are
utility functions. The utility of a state in which black has won a game of
chess is obviously high for the agent playing black and low for the agent
playing white.
There
is no measure that can count test or preferences. Someone loves deep chocolate
icecream and someone loves chocochip icecream. A utility function can account
for altruistic behavior, simply by including the welfare of other as one of the
factors contributing to the agent's own utility.
Decision
theory
Preferences
as expressed by utilities are combined with probabilities for making rational
decisions. This theory, of rational decision making is called as decision
theory.
Decision
theory can be summarized as,
Decision
theory = Probability theory + Utility theory.
•
The principle of Maximum Expected Utility (MEU):
Decision
theory says that the agent is rational if and only if it chooses the action
that yields highest expected utility,averaged over all the possible outcomes of
the action.
•
Design for a decision theoretic agent:
Following
algorithm sketches the structure of an agent that uses decision theory to
select actions.
The
algorithm
Function:
DT-AGENT (percept) returns an action.
Static: belief-state, probabilistic beliefs about the current state of
the world. action, the agent's action.
- Update belief-state based on action
and percept
- Calculate outcome probabilities for actions,
given actions descriptions and current belief-state
- Select action with highest expected utility
given probabilities of outcomes and utility information
-
Return action.
A
decision therotic agent that selects rational actions.
The
decision theoretic agent is identical, at an abstract level, to the logical
agent. The primary difference is that the decision theoretic agent's knowledge
of the current state is uncertain; the agent's belief state is a representation
of the probabilities of all possible actual states of the world.
As
time passes, the agent accumulates more evidence and its belief state changes.
Given the belief state, the agent can make probabilistic predictions of action
outcomes and hence select the action with highest expected utility.
The Basic Probability Notation
The
probability theory uses propositional logic language with additional expressivness.
The
probability theory uses represent prior probability statements, which apply
before any evidence is obtained. The probability theory uses conditional
probability statements which include the evidence explicitly.
1. Propositions
1)
The propositions (assertions) are attached with the degree of belief.
2)
Complex proposition can be formed using standard logical connectives.
For
example: [(Cavity = True) (Toothache = False)]
and [(Cavity Toothache)] both are same assertions.
•
The random variable:
1)
The basic element of language is random variable.
2)
It reffers to a "part" of the world whose "status" is
initially unknown.
For example: In
toothache problem 'cavity' is a random variable which can refer to my left
wisdom tooth or right wisdom tooth.
3)
Random variables are like symbols in propositional logic.
4)
Random variables are represented using capital letters. Whereas unknown random
variable can be represented with lowercase letter.
For example: P (a) = 1
- P (-a)
5)
Each random variable has a domain of values that it can take on. That is domain
is, set of allowable values for random variable.
For example: The domain
of cavity can be < true, false >
6) A
random variable's proposition will assert that what value is drawn for the
random variable from its domain.
For example: Cavity =
True is proposition.
Saying
that "there is" cavity in my lower left wisdom tooth".
7)
Random variables are divided into three kinds, depending on their domain. The
types are as follows.
i)
Boolean random variables: These are random
variables that can take up only boolean values.
For example: Cavity, it
takes value either true or false.
ii)
Discrete random variables: They take values from
countable domain. They also include boolean domain. The values in the domain
must be mutually exclusive and exhaustive (finite).
For example: Weather,
it has domain < sunny, rainy, cloudy, cold >
iii)
Continuous random variables: They take
values from real numbers. The domain can be either entire real line or subset of
it like intervals [2, 3].
For example: X = 4.14
asserts that X has exact value 4.14
Propositions
having continuous random variable can have inequalities like X ≤ 4.14.
2. Atomic Events
1)
An atomic event is a complete specification of the state of the world about
which agent is uncertain.
2)
They are represented as variables. These variables are assigned values from the
real world.
For
example: If the world is consists of cavity and Toothache then there are four
distinct atomic events,
a)
Cavity = False Ʌ Toothache = True
b)
Cavity = False Ʌ Toothache = False
c)
Cavity = True Ʌ Toothache = False
d)
Cavity = True Ʌ Toothache = True
e)
Properties of atomic events
i)
They are mutually exclusive - That is at most one can actually be the case. For
example: (Cavity Ʌ Toothache) and (Cavity Ʌ ⌐ Toothache) can not both be the
case.
ii)
The set of all possible atomic events is exhaustive out of which at least one
must be the case. That is, the disjunction of all atomic events is logically
equivalent to true.
iii)
Any particular atomic event entails the truth or falsehood of every proposition,
whether simple or complex.
For
example -
The
atomic event
(Cavity
Ʌ⌐ Toothache) entails the truth of cavity and the Falsehood of (cavity →
toothache).
iv)
Any proposition is logically equivalent to the disjunction of all atomic events
that entail the truth of the proposition.
For
example: The proposition cavity is equivalent to disjunction of the atomic
events (cavityɅtoothache) and (cavity Ʌ ⌐ toothache).
3. Prior Probability (Unconditional Probability)
1)
The prior (unconditional) probability is associated with a proposition 'a'.
2)
It is the degree of belief accorded to a proposition in the absence
of information.
3)
It is written as P(a).
For
example: The probability that, Ram has cavity = 0.1, then prior probability is
written as, P (Cavity = true) = 0.1 or P (Cavity) = 0.1
4)
It should be noted that as soon as new information is received, one should
reason with the conditional probability of 'a' depending upon new information.
5) When it is required to express probabilities of all the possible values of a
random variable, then a vector of values is used. It is represented using P(a).
This represents values for the probabilities of each individual state of the
'a'.
For
example: P (Weather) = < 0.7, 0.2, 0.08, 0.02 > is representing four
equations
P
(Weather = Sunny) = 0.7
P
(Weather = Rain) = 0.2
P
(Weather = Cloudy) = 0.08
P
(Weather = Cold) = 0.02
6)
The expression P(a) is said to be defining prior probability distribution for
the random variable 'a'.
7)
To denote probabilities of all random variables combinations, the expression
P(a1, a2) can be used. This is called as joint
probability distribution for random variables a1, a2. Any
number of random variables can be mentioned in the expression.
8) A
simple example of joint probability distribution is,
→
P<Weather, Cavity> can be represented as, 4×2 table of probabilities.
(Weather's
probability) (Cavity probability)
9) A
joint probability distribution that covers the complete set of random variables
is called as full joint probability distribution.
10)
A simple example of full joint probability distribution is,
If
problem world consists of 3 random variables, wheather, cavity, toothache then
full joint probability distribution would be,
P<Weather,
Cavity, Toothache>
It
will be represented as, 4×2×2, table of probabilities.
11)
Prior probability for continuous random variable:
i)
For continuous random variable it is not feasible to represent vector of all
possible values because the values are infinite. For continuous random variable
the probability is defined as a function with parameter x, which indicates that
random variable takes some value x.
For example: Let random
variable x denotes the tomorrow's temperature in Chennai. It would be
represented as,
P(X
= x) = U [25 – 37] (x).
This
sentence express the belief that X is distributed uniformly between 25 and 37
degrees celcius.
ii)
The probability distribution for continuous random variable has probability
density function.
4. Conditional Probability
1)
When agent obtains evidence concerning previously unknown random variables in
the domain, then prior probability are not used. Based on new information
conditional or posterior probabilities are calculated.
2)
The notation is P(a | b) where a and b are any proposition.
The
'P' is read as "the probability of a given that all we know is b".
That is when b is known it indicates probability of a.
For
example: P (Cavity | Toothache) = 0.8
it
means that, if patient has toothache (and no other information is known) then
the chances of having cavity are = 0.8
3)
Prior probability are infact special case of conditional probability. It can be
represented as P(a) which means that probability 'a' is conditioned on no
evidence.
4)
Conditional probability can be defined interms of unconditional probabilities.
The equation would look like,
P(a/b)
=P(aɅb) / P(b), it holds whenever P(b) > 0 …(7.1.1)
The
above equation can also be written as,
P(a
Ʌ b) = P(a | b) P(b)
This
is called as product rule. In other words it says, for 'a' and 'b' to be true
we need 'b' to be true and we need a to be true given b. It can be also written
as,
P(a
Ʌ b)= P(b | a) P(a).
5)
Conditional probability are used for probabilistic inferencing.
6) P
notation can be used for conditional distribution. P(x | y) gives the values of
P(X = xi | Y = yj) for each possible i, j. following are
the individual equations,
P(X
= x1 ^ Y = y1) = P(X = x1 |Y = y1) P(Y
= y1)
P(X =
x1 ^ Y = y2) = P(X = x1 |Y = y2) P(Y
= y2)
These
can be combined into a single equation as,
P(X,
Y) = P(X | Y) P(Y)
7)
Conditional probabilities should not be treated as logical implications. That
is, "When 'b' holds then probability of 'a' is something", is a
conditional probability o and not to be mistake as logical implication. It is
wrong on two points, one is, P(a) always denotes prior probability. For this it
do not require any evidence. P(a | b) = 0.7, is immediately relevant when b is
available evidence. This will keep on altering. When information is updated
logical Implications do not change over time.
5. The Probability Axioms
Axioms
gives semantic of probability statements. The basic axioms (Kolmogorov's
axioms) serve to define the probability scale and its end points.
1)
All probabilities are between 0 and 1. For any proposition a, 0 ≤ P(a) ≤1.
2)
Necessarily true (i.e, valid) propositions have probability 1, and necessarily
false (i.e., unsatisfiable) propositions have probability 0.
P(true)
= 1 P(false) = 0
3)
The probability of a disjunction is given by
P (a
v b) = P(a) + P(b) - P(a Ʌ b)
This
axiom connects the probabilities of logically related propositions. This rule
states that, the cases where 'a' holds, together with the cases where 'b'
holds, certainly cover all the causes where 'a v b' holds; but summing the two
sets of cases counts their intersection twice, so we need to subtract P(a Ʌ b).
Note The axioms deal only with prior probabilities rather than
conditional probabilities; this is because prior probability can be defined in
terms of conditional probability.
Using
the axioms of probability:
From
basic probability axioms following facts can be deduced.
P(a v¬ a) = P(a) + P(¬a) - P(a Ʌ¬a) (by axiom
3 with b = ¬ a)
P(true)
= P(a) + P(¬ a) - P(false) (by logical equivalence)
1 =
P(a) + P(¬ a) (by axiom 2)
P(¬
a) = 1 - P(a) (by algebra).
•
Let the discrete variable D have the domain <d1,.....,
dn>.
Then,
Σni=1 P(D=di) = 1.
That
is, any probability distribution on a single variable must sum to 1.
•
It is also true that any joint probability
distribution on any set of variables must sum to 1. This can be seen simply by
creating a single megavariable whose domain is the cross product of the
domains of the original variables.
•
Atomic events are mutually exclusive, so the
probability of any conjunction of atomic events is zero, by axiom 2.
•
From axiom 3, we can derive the following simple
relationship: The probability of a proposition is equal to the sum of the
probabilities of atomic events in which it holds; that is P(a) = Σei ε
e(a) P(ei) …..(7.1.2)
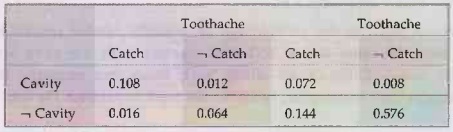
6. Inference using Full Joint Distribution
Probabilistic
inference means, computation from observed evidence of posterior probabilities,
for query propositions. The knowledge base used for answering the query is
represented as full joint distribution. Consider simple example, consists of
three boolean variables, toothache, cavity, catch. The full joint distribution
is 2×2×2, as shown below.
Note
that the probability in the joint distribution sum to 9.
•
One particular common task in inferencing is to
extract the distribution over some subset of variables or a single variable.
This distribution over some variables or single variables is called as marginal
probability.
For
example: P(Cavity) = 0.108 +0.012+ 0.072 + 0.008. = 0.2
This
process is called as marginalization or summing. Because the variables other
than 'cavity' (that is whose probability is being counted) are summed out.
•
The general marginalization rule is as follows,
For
any sets of variables Y and Z,
P(Y)
= Σ z P(Y, z). ….(7.1.3)
It
indicates that distribution Y can be obtained by summing out all the other
paulay to variables from any joint distribution X containing Y.
•
Variant of above example of general marginalization rule
involved the conditional to to probabilities using product rule.
P(Y)
= Σ z P(Y | z) P(z)
….(7.1.4)
This
rule is conditioning rule.
For example: Computing
probability of a cavity, given evidence of a toothacheis as follows:
P(Cavity
| Toothache) =P(Cavity Ʌ Toothache) /P(Toothache) = 0.108+0.012 /
0.108+0.012+0.016+0.064 = 0.6
•
Normalization constant: It is variable that remains
constant for the distribution, which ensures that it adds in to 1. a is used to
denote such constant.
For
example: We can compute the probability of a cavity, given evidence of a
toothache, as follows:
P(Cavity
| Toothache) = P(Cavity Ʌ Toothache)/
P(Toothache) =
0.108+0.012/
0.108+0.012+0.016+0.064
= 0.6
Just
to check we can also compute the probability that there is no cavity given a
toothache:
P(
Cavity / Toothache)=
P (¬Cavity Ʌ Tootache) /P (Toothache) = 0.016+
0.064 / 0.108+0.012+ 0.016+ 0.064 = 0.4
Notice
that in these two calculations the term 1/P (toothache) remains constant, no
matter which value of cavity we calculate. With this notation we can write
above two equations in one.
P(Cavity
| Toothache) = αP(Cavity, Toothache)
= α
[P(Cavity, Toothache, Catch) + P(Cavity, Toothache, ¬ Catch)]
= α
[< 0.108, 0.016> + <0.012, 0.064>]
= α
<0.12, 0.08> = <0.6, 0.4>
From
above one can extract a general inference procedure.
Consider
the case in which query involves a single variable. The notation used is let X
be the query variable (cavity in the example), let E be the set of evidence
variables (just toothache in the example) let e be the observed values for
them, and let Y be the remaining unobserved variable (just catch in the
example). The query is P(X/e) and can be evaluated as
P(X
| e) = α P(X, e) = α Σ y P(X, e, y) ……(7.1.5)
where the summation is over all possible ys (i.e. all possible combinations of values of the unobserved variables 'y'). Notice that together the variables, X, E and Y constitute the complete set of variables for the domain, so P (X, e, y) is simply a subset of probabilities from the full joint distribution.
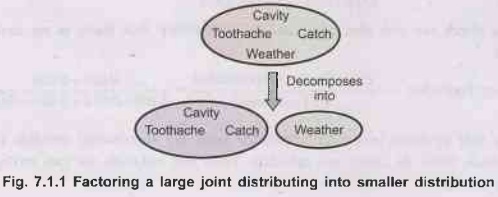
7. Independance
It
is a relationship between two different sets of full joint distributions. It is
also called as marginal or absolute independance of the variables. Independence
indicates that whether the two full joint distributions affects probability of
each other.
The
independance between variables X and Y can be written as follows,
P(X
| Y) = P(X) or P(Y | X) = P(Y) or P(X, Y) = P(X) P(Y)
•
For example: The weather is independant of once
dental problem. Which can be shown as below equation.
P(Toothache,
Catch, Cavity, Weather) = P(Toothache, Catch, Cavity) P(Weather).
•
Following diagram shows factoring a large joint
distributing into smaller distributions, using absolute independence. Weather
and dental problems are independent.
8. Bayes' Rule
Bayes'
rule is derived from the product rule.
The
product rule can be written as,
P(a
Ʌ b)=P(a | b) P(b) .…(7.1.6)
P(a
Ʌ b)=P(b | a) P(a) ....
(7.1.7)
[because
conjunction is commutative]
Equating
right sides of equation (7.1.6) and equation (7.1.7) and dividing by P(a),
P(b |
a) = P(a | b)P(b) / P(a)
This
equation is called as Bayes' rule or Bayes' theorem or Bayes' law. This rule is
very useful in probabilistic inferences.
Generalized
Bayes' rule is,
P(Y
| X) = P(X | Y) P(Y) / P(X)
(where
P has same meanings)
We
can have more general version, conditionalized on some background evidence e.
P(Y
| X, e) = P(X |Y, e) P(Y | e) / P(X | e)
General
form of Bays' rule with normalization's
P(y
| x) = α P(x | y) P(y).
Applying
Bays' Rule:
1)
It requires total three terms (1 conditional probability and 2 unconditional
Probabilities). For computing one conditional probability.
For
example: Probability of patient having low sugar has high blood pressure is
50
%.
Let,
M be proposition, 'patient has low sugar'.
S be
a proposition, 'patient has high blood pressure'.
Suppose
we assume that, doctor knows following unconditional fact,
i) Prior
probabilition of (m) = 1/50,000.
ii) Prior
probability of (s) = 1/20.
Then
we have,
P(s
| m) = 0.5
P(m)
= 1 | 50000
P(s)
= 1 | 20
P(m/s)
= P(s | m) P(m) / P(s)
=
0.5×1/50000 /1/20
=
0.0002
That
is, we can expect that 1 in 5000 with high B.P. will has low sugar.
2)
Combining evidence in Bayes' rule.
Bayes
rule is helpful for answering queries conditioned on evidences.
For
example: Toothache and catch both evidences are available then cavity is sure
to exist. Which can be represented as,
P(Cavity
| Toothache ^ Catch) = α <0.108, 0.016> ≈ <0.871, 0.129>
By
using Bayes' rule to reformulate the problem:
P(Cavity | Toothache ^ Catch) = α P(Toothache A Catch | Cavity) P(Cavity) ……(7.1.8)
For
this reformulation to work, we need to know the conditional probabilities of
the conjunction Toothache Catch for each value of Cavity. That might be
feasible for just two evidence variables, but again it will not scale up.
If
there are n possible evidence variable (X-rays, diet, oral hygiene, etc.), then
there are 2n possible combinations of observed values for which we
would need to know conditional probabilities.
The
notion of independence can be used here. These variables are independent,
however, given the presence or the absence of a cavity. Each is directly caused
by the cavity, but neither has a direct effect on the other. Toothache depends
on the state of the nerves in the tooth, where as the probe's accuracy depends
on the dentist's skill, to which the toothache is irrelevant.
Mathematically,
this property is written as,
P(Toothache
^ Catch | Cavity) = P(Toothache | Cavity) P(Catch | Cavity) .…(7.1.9)
This
equation expresses the conditional independence of toothache and catch, given
cavity.
Substitute
equation (7.1.3) into (7.1.4) to obtain the probability of a cavity:
P
(Cavity | Toothache ^Catch) = α P (Toothache | Cavity) P (Catch | Cavity) P
(Cavity)
Now,
the information requirement are the same as for inference using each piece of
evidence separately the prior probability P(Cavity) for the query variable and
the conditional probability of each effect, given its cause.
Conditional
independence assertions can allow probabilistic systems to scale up; more over,
they are much more commonly available than absolute independence assertions.
When their are 'n' variables given that they are all conditionally independent,
the size of the representation grows as O(n) instead of O(2n).
For
example -
Consider
dentistry example, in which a single cause, directly influences a number of
effects, all of which are conditionally independent, given the cause.
The
full joint distribution can be written as,
P(Cause,
Effect1,..., Effectn) = P(Cause) II P(Effecti
| Cause).
Artificial Intelligence and Machine Learning: Unit II: Probabilistic Reasoning : Tag: : Probabilistic Reasoning - Artificial Intelligence and Machine Learning - Introduction of Probabilistic Reasoning
Related Topics
Related Subjects

Artificial Intelligence and Machine Learning
CS3491 4th Semester CSE/ECE Dept | 2021 Regulation | 4th Semester CSE/ECE Dept 2021 Regulation