Artificial Intelligence and Machine Learning: Unit I(f): Constraint Satisfaction Problems (CSP)
Higher Order and Directional Consistency
Constraint Satisfaction Problems (CSP) - Artificial Intelligence and Machine Learning
There have been many advances in how constraint solvers search for solutions. We look first at a pre-processing step which can greatly improve efficiency by pruning the search space, namely arc-consistency.
Higher
Order and Directional Consistency
Arc
consistency
•
There have been many advances in how constraint
solvers search for solutions. We look first at a pre-processing step which can
greatly improve efficiency by pruning the search space, namely arc-consistency.
Following this, we'll look at two search methods, backtracking and forward
checking which keep assigning values to variables until a solution is found.
Finally, we'll look at some heuristics for improving the efficiency of the
solver, namely how to order the choosing of the variables, and how to order the
assigning of the values to variables.
•
The pre-processing routine for binary constraints
known as arc-consistency involves calling a pair (xi, xj)
an arc and noting that this is an ordered pair, i.e., it is not the same as (xj,
xi). Each arc is associated with a single constraint Cij,
which constrains variables xi and xj. We say that the arc
(xi, xj) is consistent if, for all values a in Di,
there is a value b in Dj such that the assignment xi = a
and xj = b satisfies constraint Cij. Note that (xi,
xj) being consistent doesn't necessarily mean that (xj, xi)
is also consistent. To use this in a pre-processing way, we take every pair of
variables and make it arc-consistent. That is, we take each pair (xi,
xj) and remove variables from Di which make it
inconsistent, until it becomes consistent. This effectively removes values from
the domain of variables, hence prunes the search space and makes it likely that
the solver will succeed (or fail to find a solution) more quickly.
•
To demonstrate the worth of performing an
arc-consistency check before starting asearch for a solution, we'll use an
example from Barbara Smith's tutorial. Suppose that we have four tasks to
complete, A, B, C and D, and we're trying to schedule them. They are subject to
the constraints that:
• Task A lasts 3
hours and precedes tasks B and C
• Task B lasts 2
hours and precedes task D
• Task C lasts 4
hours and precedes task D
• Task D lasts 2
hours
•
We will model this problem with a variable for each
of the task start times, namely startA, startB, startC and startD. We'll also
have a variable for the overall start time: start, and a variable for the
overall finishing time: finish. We will say that the domain for variable start
is {0}, but the domains for all the other variables is {0,1,...,11),
because the summation of the duration of the tasks is 3 + 2 + 4 + 2 = 11. We
can now translate our English specification of the constraints into our formal
model. We start with an intermediate translation thus:
• start ≤ startA
• startA +3 ≤
startB
• startA + 3 ≤
startC
• startB + 2 ≤
startD
• startC + 2 ≤
startD
• startD + 2 ≤
finish
•
Then, by thinking about the values that each pair of
variables can take simultaneously, we can write the constraints as follows:
•
Cstart,startA= {(0,0), (0,1), (0,2), ...,
(0,11)}
•
CstartA,start = {(0,0), (1,0), (2,0), ...,
(11,0)}
•
CstartA,startB = {(0,3), (0,4), (0,11),
(1,4), (1,5), ..., (8,11)) etc.
•
Now, we will check whether each arc is
arc-consistent, and if not, we will remove values from the domains of variables
until we get consistency. We look first at the arc (start, startA) which is
associated with the constraint {(0,0), (0,1), (0,2), ..., (0,11)} above. We
need to check whether there is any value, P, in Dstart that does not
have a corresponding value, Q, such that (P,Q) satisfies the constraint, i.e.,
appears in the set of assignable pairs. As Dstart is just {0}, we
are fine. We next look at the arc (startA, start), and check whether there is
any value in DstartA, P, which doesn't have a corresponding Q such
that (P,Q) is in CstartA, start Again, we are OK, because all the
values in DstartA appear in CstartA,start
•
If we now look at the arc (startA, startB), then the
constraint in question is: {(0,3), (0,4), (0,11), (1,4), (1,5), ..., (8,11)).
We see that their is no pair of the form (9,Q) in the constraint, similarly no
pair of the form (10,Q) or (11,Q). Hence, this arc is not arc-consistent, and
we have to remove the values 9, 10 and 11 from the domain of startA in order to
make the arc consistent. This makes sense, because we know that, if task B is
going to start after task A, which has duration 3 hours, and they are all going
to have started by the eleventh hour, then task A cannot start after the eighth
hour. Hence, we can - and do - remove the values 9, 10 and 11 from the domain
of startA.
•
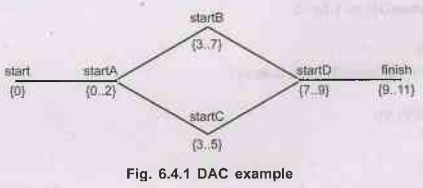
This method of removing values from domains is highly
effective. As reported in Barbara Smith's tutorial, the domains become quite
small, as reflected in the following scheduling network shown in Fig. 6.4.1
•
We see that the largest domain size has only 5 values
in it, which means that STOD quite a lot of the search space has been pruned.
In practice, to remove as many variables as possible in a CSP which is
dependent on precedence constraints, we have to work backwards, i.e., look at
the start time of the task, T, which must occur last, then make each arc of the
form (startT, Y) consistent for every variable Y. Following this, move on to
the task which must occur second to last, etc. In CSPs which only involve
precedence constraints, arc-consistency is guaranteed to remove all values
which cannot appear in a solution to the CSP. In general, however, we cannot
make such a guarantee, but arc-consistency usually has some effect on the
initial specification of a problem.
Directional
Arc Consistency (DAC)
•
The above discussed arc consistency for CSP is not
directional at all as each arc is assumed in both directions in the AC-x
algorithms. Although, the node and arc consistency algorithms seem easy they
are still stronger than necessary for some problems, for example, for enabling
backtrack-free search in CSPs which constraints form trees. Therefore yet
simpler concept was proposed to achieve some form of consistency, namely,
Directional Arc Consistency (DAC) that is defined under total ordering of the
variables.
•
Definition: A
CSP is directional arc consistent under an ordering of variables (0.0) if and
only if every arc (Vi, Vj) in its constraint graph such
that such that i < j according to the ordering is arc consistent.
•
Notice the difference between AC and DAC, in AC we
check every arc (V;, V) 92639 while in DAC only the arcs (Vi, Vj) where i <
j are considered. Consequently, the arc consistency is stronger than
directional arc consistency, i.e., arc consistent CSP Jon is also directional
arc consistent but not vice versa (directional arc consistent CSP is not
necessarily arc consistent as well).
Algorithm
DAC (algorithm for achieving directional arc consistency):
procedure
DAC-1(G)
for
j = nodes (G) | to 1 by -1
do
for each
arc (Vi,Vj) in arcs (G) such that i<j
do
REVISE (Vi,Vj)
end for
end for
end
DAC-1
Artificial Intelligence and Machine Learning: Unit I(f): Constraint Satisfaction Problems (CSP) : Tag: : Constraint Satisfaction Problems (CSP) - Artificial Intelligence and Machine Learning - Higher Order and Directional Consistency
Related Topics
Related Subjects

Artificial Intelligence and Machine Learning
CS3491 4th Semester CSE/ECE Dept | 2021 Regulation | 4th Semester CSE/ECE Dept 2021 Regulation