Artificial Intelligence and Machine Learning: Unit I(c): Uninformed Search Strategies
Example Problems of Uninformed Search Strategies
Uninformed Search Strategies - Artificial Intelligence and Machine Learning
There are variety of task environments ranging from easier to complex ones, therefore problem solving approach should be realistic which can give solution for any type of task environment which in turn is useful for mankind.
UNIT I
Chapter: 3: Uninformed Search Strategies
Example Problems
AU
Dec.-10, 14, May-14
There
are variety of task environments ranging from easier to complex ones, therefore
problem solving approach should be realistic which can give solution for any
type of task environment which in turn is useful for mankind. Problems can be
categorized as toy problems and real-world problems.
Toy Problem
A
Toy problem is a problem which illustrates various problem-solving methods.
Characteristics
of Toy problem
1) For
the Toy problem exact and precised description can be given.
2)
These problem provide basis for solving some real-life problems.
3)
They can be used by researchers to compare performance of algorithms.
For
example: 8-queen puzzle, vacuum world, ball picker robot.
Real World Problem
A
real-world problem is a problem which needs to be solved so that its solution
can be utilized in practical life. They will not have some predefined. Well
described, single specification. In fact while considering these problem general
formulation needs to be done.
People
do care about the solutions of real-world problem as they are benefited from it.
For
example: Route finding for a trip, Travelling salesman problem, Robot
navigation, Car reversing guide.
Problem Formulation for Toy Problems
Now
let us see some toy problem examples.
Each
example gives all 4 aspects of problem formulation namely
1)
Initial state
2)
Successor function
3)
Goal state
4)
Path cost.
Also
we list all the possible states of problem solution, through which agent can
pass or move.
Example
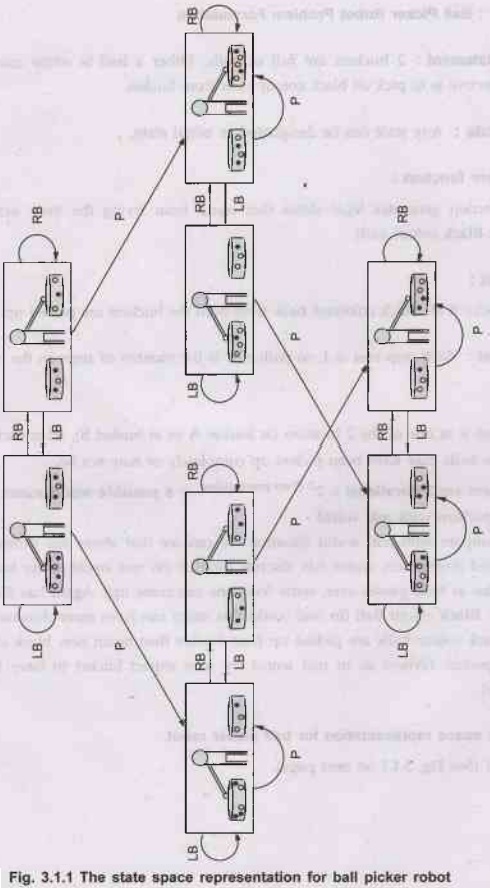
1 Ball Picker Robot Problem Formulation
Problem
statement: 2 buckets are full of balls.
Either a ball is white colour or red colour. Objective is to pick all black
colour balls from bucket.
1)
Initial state: Any state can be designated as initial state.
2)
Successor function:
This
function generates legal states that result from trying the three actions
(Left, Right, Pick Black colour ball).
3)
Goal test:
This
checks if all Black coloured balls from both the buckets are picked up.
4)
Path cost: Each step cost is 1, so path cost is
the number of steps in the path.
5)
States:
The
agent is at one of the 2 location (at bucket A or at bucket B), from each of
which black colour balls may have been picked up completely or may not be.
Thus
there are 2 (locations) x 22(Two possiblities) = 8 possible world
states.
•
Comparison with real world -
If
we compare with real world situation we can see that above toy problem has all
well specified description. Agent has discrete location (in real world many
locations can be there, also as time passes over, more locations can come up).
Agent has discrete pick up item i.e. Black colour ball (In real world this
items can have more dimensions). Also once all Black colour balls are picked up
from bucket then again new black colour balls are not expected. (Where as in
real world we may expect bucket to have new Black colour balls).
•
The state space representation for ball picker
robot
Fig.
3.1.1 (See Fig. 3.1.1 on next page).
Example 2: 8-Queen Problem
Problem
Statement: Given a chess board of 8x8
size, objective is to place 8 queens on a chess board such that no two queens
are attacking. (A queen same row, column or diagonal).
1)
Initial state: No queens on the board.
2)
Successor function:
Add
a queen to any empty square, such that it do not attack other queen.
3)
Goal test: 8-queens on the board such that no
queens attack each other.
4)
Path cost: Each step costs 1, so the path cost is
the number of steps in the path.
5)
States: Any arrangements of 1 to 8 queens on
the board is a state. This formulation has, 64 x 63 x...57≈ 3×1014
possible sequences to investigate. But the condition of non-attacking reduces
the states to 2057 from 3×1014.
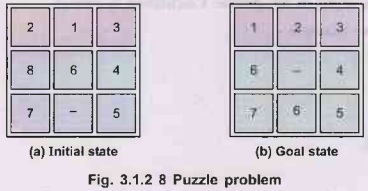
Example 3: 8-Puzzle
Problem
Statement: Consists of 3x3 board with eight
numbered tiles and a blank space. A tile adjacent to the blank space can slide
into the space. The object is to reach a specified goal state, such as the one
shown on the right of the figure.
1)
States:
A
state description specifies the location of each of the eight tiles and the
blank in one of the nine squares.
2)
Initial state:
Any
state can be designated as the initial state. Note that any given goal reached
from exactly half of the possible initial states.
3)
Successor function:
This
function generates the legal states that result from trying the four actions.
(blank moves, left, right, up or down).
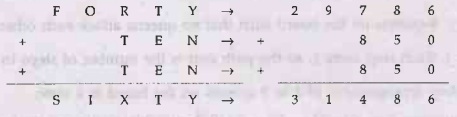
Example 4 -Cryptarithmetic
Problem
Statement: Find an assignment of digits (0, ...,
9) to letters so that a given arithmetic expression is true.
For
example - Applying digit to a letter.
1)
States: Puzzle with letters and digits.
2)
Initial state: Only letters present.
3)
Successor function (operators): Replace
all occurrences of a letter by a digit not used yet.
4)
Goal test: Only digits in the puzzle. Calculation
is correct.
Solution
for above example -
F =
2, O = 9,
R =
7, T = 8,
Y =
6, E = 5,
N =
0,I = 1,
X =
4, S = 3.
5)
Goal test: This checks whether the state matches
the goal configuration.
6)
Path cost: Each step costs 1, so the
path cost is the number of steps in the path.
Example 5 - Missionaries and Cannibals
•
Problem Statement:
There
are 3 missionaries, 3 cannibals, and 1 boat that can carry upto two people on
one side of a river.
Goal: Move all missionaries and cannibals across the river.
Constraint: Missionaries can never be out numbered by cannibals or either
side ofthe river, or else the missionaries are killed.
1)
States
•
Number of missionaries, cannibals, and boats on the
banks of a river
•
Illegal states: Missionaries are outnumbered by
cannibals on either bank.
2)
Initial states
•
All missionaries, cannibals and boats are on one
bank.
3)
Successor function (operators)
•
Transport a set of upto two participants to the other
bank
{1
missionary} or {1 cannibal } or {2 missionaries } or {2 cannibals } or
{1
missionary and 1 cannibal }
4)
Goal test
•
Nobody left on the initial river bank.
5)
Path cost
•
Number of crossings.
•
Also known as "Goats and cabbage, Wolves and
sheep", etc.
Example 6 - Water Jug Problem
Problem
Statement: Given 3 jugs (9, 5 and 3 liters), a
water pump and a sink, how do you get exactly 7 liters into the 9 litre jug.
1)
State:
(X,
Y, Z) for liters in jugs 1, 2 and 3. Integers 0 to 9 are assigned to all
possible permutations of 1, 2, 3.
Operations
-
Empty
jug, fill jug
Ex =
fill (0, 5, 0)
2)
Initial state: (0, 0, 0)
3)
Goal state: (X, X, 7)
4)
Solution sequence: (5, 0, 0 (0, 5, 0 (0, 0, 0 etc)
Real-World Problem Examples
Example 1 - General Route Finding Problem
Problem Statement:
Route-finding problem is defined in terms of specified locations and
transitions along links between them. Route-finding algorithms are used in a
variety of applications, such as routing in computer networks, military
operations planning, and air line travel planning systems.
1)
States: Locations
2)
Initial state: Starting point
3)
Successor function (operators): Move from
one location to another.
4)
Goal test: Arrive at a certain location.
5)
Path cost: May be quite complex, which can involve
factors like, Money, time, travel, comfort, scenery, ... etc.
•
Simplified Example of Route Finding Problem
[Airline Travelling Problem]
Problem
Statement: Starting from initial location one has
to reach at the specified destination by some prespecified time.
1)
States: Each state is represented by a location
(e.g. an airport) and the current time.
2)
Initial state: This is specified by the
problem.
3)
Successor function:
This
returns the states resulting from taking any scheduled flight (perhaps further
specified by seat class and location), leaving later than the current time plus
the time within-airport transit time, from the current airport to another.
4)
Goal test: Are we at the destination by some
prespecified time?
5)
Path cost:
This
depends on monetary cost, waiting time, flight time, customs and immignation
procedures, seat quality, time of day, type of airplane, frequent-flyer mileage
awards, and so on.
Example 2 - Travelling Sales Person Problem
Problem
Statement: It is a touring problem in
which each city must be visited exactly once. The aim is to find the shortest
tour. The problem is known to be NP-hard.
1)
States
•
Locations/cities.
•
Illegal states.
a) Each city may be visited only once.
b) Visited cities must be kept as state
information.
2)
Initial state
•
Starting point.
•
No cities visited.
3)
Successor function (operators)
•
Move from one location to another one.
4)
Goal test
•
All locations visited.
•
Agent at the initial location.
5)
Path cost
•
Distance between locations.
In
addition to planning trips for traveling sales persons, these algorithms have
been used for tasks such as planning movements of automatic circuit-board
drills, and for stocking machines on shop floors.
Example 3 - VLSI Layout Problem
Problem
Statement: A VLSI layout problem requires
positioning millions of components and connections on a chip to minimize area,
minimize circuit delays, minimize stray capacitances, and maximize
manufacturing yield.
1)
States
•
Positions of components, wires on a chip.
2)
Initial state
•
Incremental: No component placed.
•
Complete-state: All components place (e.g. randomly, manually).
3)
Successor function (operators)
•
Incremental: Place components, route wire.
•
Complete-state: Move component, move wire.
4)
Goal test
•
All components placed.
•
Components connected as specified.
5)
Path cost
•
May be complex.
One
can consider distance, capacity, number of connections per component, for path
cost computation.
Detail
description of VLSI layout problem
When
logical design is made, the layout problem come and the problem is divided into
two parts 1) Cell layout 2) Channel routing as below -
1)
Cell layout
a)
The basic components of circuit are grouped into cells, each cells perform some
recognition. The cells of standard size are connected to each of the other
cell.
b)
The overlapping between the cell component is avoided. Some sort of room is
provided for connecting wires.
2)
Channel routing
a)
The cell components are fixed on a chip.
b)
The channel routing task is to search a particular route for each wire. The
functional task is achieved through the gaps between the cells.
c)
The complex algorithm are designed to perform the channel routing. The degree
of complexity is so high, but it is always possible to solve problem with
specific algorithm.
Example 4 - Robot Navigation
Problem Statement: Robot
navigation is a generalization of the route-finding problem. Rather than a
discrete set of routers, a robot can move in a continuous space with (in
principle) an infinite set of possible actions and states. For a circular robot
moving on a flat surface the space is essentially two-dimensional. When the
robot has arms and legs or wheels then it must also be controlled, the search
space becomes many-dimensional.
1)
States
•
Locations.
•
Position of actuators.
2)
Initial state
•
Start position (dependent on the task).
3)
Successor function (operators)
•
Movement, actions of actuators.
4)
Goal test
•
Task-dependent.
5)
Path cost
•
May be very complex.
•
Distance, energy consumption.
Example
5 - Assembly Sequencing
Problem
Statement: In assembly problems, the aim is to
find an order in which to assemble the parts of some object. If the wrong order
is chosen, there will be no way to add some part later in the sequence without
undoing some of the work already done. Checking a step in the sequence for
feasibility, is a difficult geometrical search problem, closely related to
robot navigation.
1)
States
•
Location of components.
2)
Initial state
•
No components assembled.
3)
Successor function (operators)
•
Place component.
4)
Goal test
•
System fully assembled.
5)
Path cost
Number
of moves
Another
example of assembly sequencing is protein design, in which the goal is to find
a sequence of amino acids that with fold into a three-dimensional protein with
the right properties to cure some disease.
Artificial Intelligence and Machine Learning: Unit I(c): Uninformed Search Strategies : Tag: : Uninformed Search Strategies - Artificial Intelligence and Machine Learning - Example Problems of Uninformed Search Strategies
Related Topics
Related Subjects

Artificial Intelligence and Machine Learning
CS3491 4th Semester CSE/ECE Dept | 2021 Regulation | 4th Semester CSE/ECE Dept 2021 Regulation