Digital Principles and Computer Organization: Unit IV: Processor
Designing a Control Unit
Processor - Digital Principles and Computer Organization
Here, we restrict ourselves to implement load word (lw), store word (sw), branch equal (beq), and the arithmetic-logical instructions add, sub, AND, OR, and set on less than. We will also the design to include a jump instruction (j).
Designing a Control Unit
AU:
Dec.-14,18
• Here, we restrict ourselves to
implement load word (lw), store word (sw), branch equal (beq), and the
arithmetic-logical instructions add, sub, AND, OR, and set on less than. We
will also the design to include a jump instruction (j).
The ALU Control
• The MIPS ALU defines the six following
combinations of four control inputs:
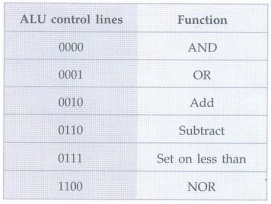
• Depending on the instruction class, the
ALU will need to perform one of these first five functions. (NOR function is
needed for other parts of the MIPS instruction set. It is not included in the
subset we are implementing.)
• In case of load word and store word
instructions, we use the ALU to compute the memory address by addition.
• In case of the R-type instructions, the
ALU needs to perform one of the five actions - AND, OR, subtract, add, or set
on less than.
• In case of branch equal, the ALU must
perform a subtraction.
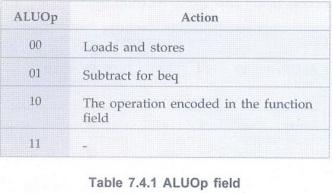
• We can control the operation of ALU by
the 4-bits ALU control input and 2-bits ALUOP. The 2-bits ALUOP is interpreted
as shown in Table 7.4.1.
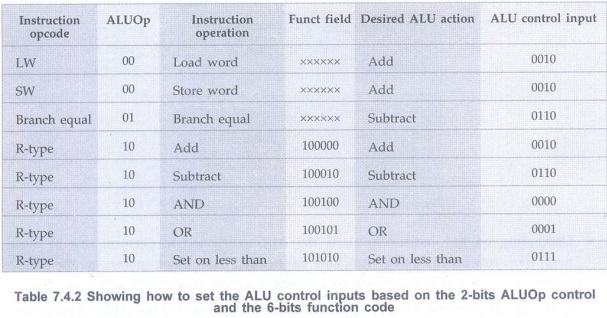
• Table 7.4.2 shows how to set the ALU
control inputs based on the 2-bits ALUOP control and the 6-bits function code.
• Here, multiple levels of decoding
technique is used.
Advantages of using multiple levels of
decoding
• It reduces the size of the main control
unit.
• Use of several smaller control units
may also potentially increase the speed of the control unit.
• Table 7.4.3 shows how the 4-bits ALU
control is set depending on these two input fields: 6-bits function fields and
2-bits ALUOp field.
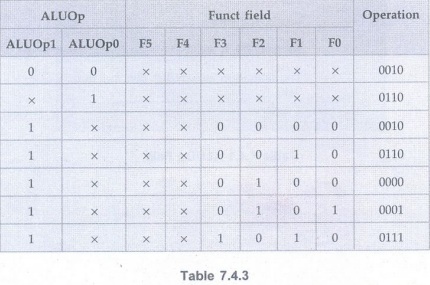
• Once the truth table has been
constructed, it can be optimized and can be implemented using logic gates.
Designing the Main Control Unit
• Before looking at the rest of the
control design, it is useful to review the formats
of the three instruction classes: The
R-type, branch and load-store instructions. Fig. 7.4.1 shows these formats.
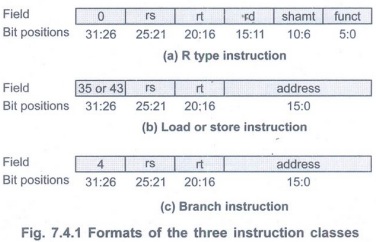
• Format for R-format instructions:
Opcode is 0. These instructions have three register operands: rs, rt, and rd.
Fields rs and rt are sources, and rd is the destination. The funct (Function)
field is an ALU function discussed in the previous section. The shamt field is
used only for shifts.
Format for load and store instructions:
Load (opcode
Format for branch equal:
Opcode is 4. The registers rs and rt are the source registers that are compared
for equality. The 16-bits address field is sign-extended, shifted, and added to
the PC + 4 to compute the branch target address.
Important observations about this
instruction format
• Bits 31: 26 in the instruction format
is op field and gives opcode (operation code). We will refer to this field as
Op[5: 0].
• Bits 25:21 and 20:16 in the instruction
format always specify the rs and rt fields, respectively.
• Bits 25: 21 always give the base
register (rs) for load and store instructions.
• Bits 15: 0 give the 16-bits offset for
branch equal, load, and store.
• The destination register is in one of
two places. For a load it is in bit positions 20: 16 (rt), while for an R-type
instruction it is in bit positions 15: 11 (rd). Thus, we will need to add a
multiplexer to select which field of the instruction is used.
• From the above information, we can add
the instruction labels and extra multiplexer (for the Write register number
input of the register file) to the simple datapath. Fig. 7.4.2 shows these
additions plus the ALU control block, the write signals for state elements, the
read signal for the data memory, and the control signals for the multiplexers.
Since all the multiplexers have two inputs, they each require a single control
line.
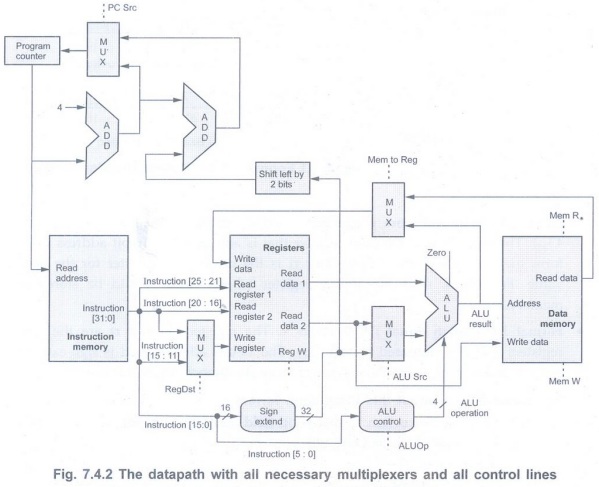
• Fig. 7.4.2 shows seven single-bit control
lines (RegDst, RegW, ALUSrc, MemW, MemR, PCSrc and MemtoReg) plus the 2-bits
ALUOP control signal.
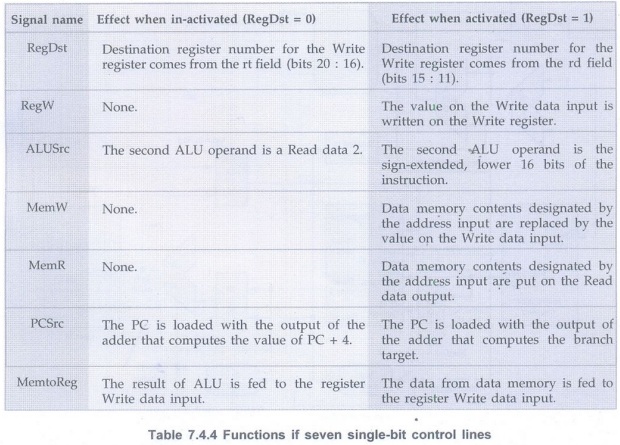
• Table 7.4.4 describes the function of
single-bit control lines.
• These nine control signals (seven
single-bit control lines and the 2-bits ALUOP control signals) can be set
according six input signals to the control unit, which are the opcode bits 31
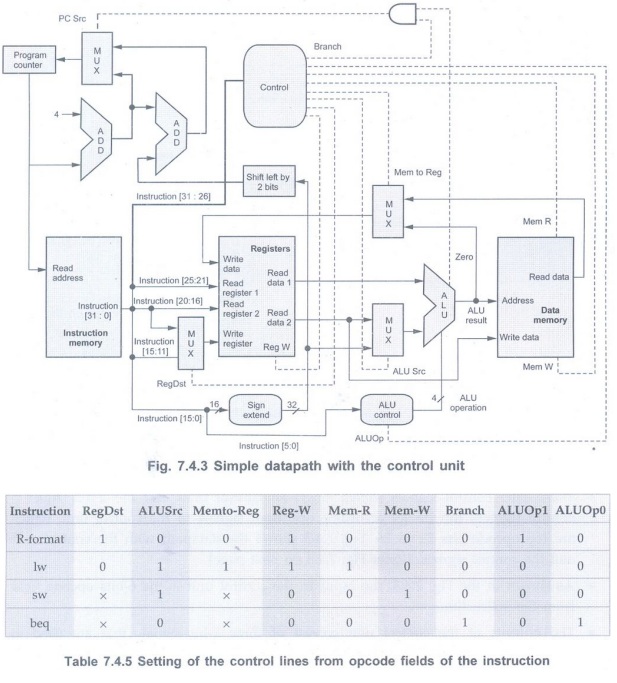
to 26. Fig. 7.4.3 shows the datapath with the control unit and the control
signals. [Refer Fig. 7.4.3 on next page]
• As shown in the Fig. 7.4.3, the input
to the control unit is the 6-bits opcode field from the instruction.
• The outputs of the control unit
consist of three 1-bit signals that are used to control multiplexors (RegDst,
ALUSrc, and MemtoReg), three signals for controlling reads and writes in the
register file and data memory (RegWrite, MemRead, and MemWrite), a 1-bit signal
used in determining whether to possibly branch (Branch), and a 2-bits control
signal for the ALU (ALUOP).
• An AND gate is used to combine the
branch control signal and the Zero output from the ALU; the AND gate output
controls the selection of the next PC.
• Table 7.4.5 defines whether each
control signal should be 0, 1, or don't care (X) for each of the opcode values.
• For all R-format instructions (add,
sub, AND, OR, and slt) the source register fields are rs and rt, and the
destination register field is rd; this defines how the signals ALUSrc and
RegDst are set (See first row of Table 7.4.5).
• R-type instruction also writes a
register (Reg W=1), but neither reads nor writes data memory.
• For all R-format instructions, the PC
should be unconditionally replaced with PC 4. Thus the Branch control signal is
0; otherwise, the PC is replaced by the branch target if the Zero output of the
ALU is also high.
• The ALUOP field for R-type instructions
is set to 10 to indicate that the ALU control should be generated from the
funct field.
• The second and third rows of Table
7.4.5 give the control signal settings for lw and sw. These ALU Src and ALUOP
fields are set to perform the address calculation.
• The MemRead and MemWrite are set to
perform the memory access. Finally, RegDst and Reg W are set for a load to
cause the result to be stored into the rt register.
• The branch instruction sends the rs and
rt registers to the ALU. The ALUOP field for branch is set for a subtract ALU
control 01), which is used to test for equality.
• It is important to note that the Mem to
Reg field is irrelevant when the Reg W signal is 0: since the register is not
being written, the value of the data on the register data write port is not
used. Thus, the entry Mem to Reg in the last two rows of the Table 7.4.5 is
replaced with X for don't care. Don't cares can also be added to RegDst when
Reg W is 0.
Operation of the Datapath
Datapath for an
R-type Instruction
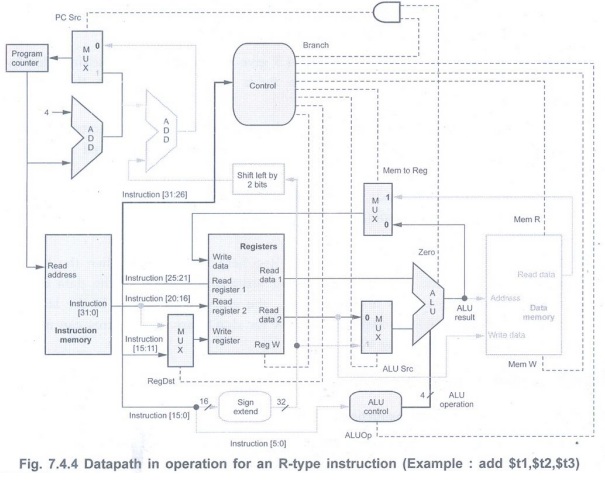
• Fig. 7.4.4 shows the operation of the
datapath for an R-type instruction. Here as an example we have considered
instruction: add $t1, $t2, $t3. The asserted control signals and active datapath
elements are highlighted. Although everything occurs in one clock cycle, the
execution of the instruction can be divided into sequential steps according to
flow of information as given below:
1. Fetch the instruction and increment
the PC.
2.Read data from two registers, $t2 and
$t3 and compute the setting of the control lines using main control unit.
3. Generate the ALU function using the
function code for addition operation (bits 50, which is the funct field, of the
instruction) and perform addition on the data read from the register file.
4. Write the result from the ALU into
the register file using bits 15: 11 of the instruction that select the
destination register ($t1).
Note The control
lines, datapath units, and connections that are active are highlighted.
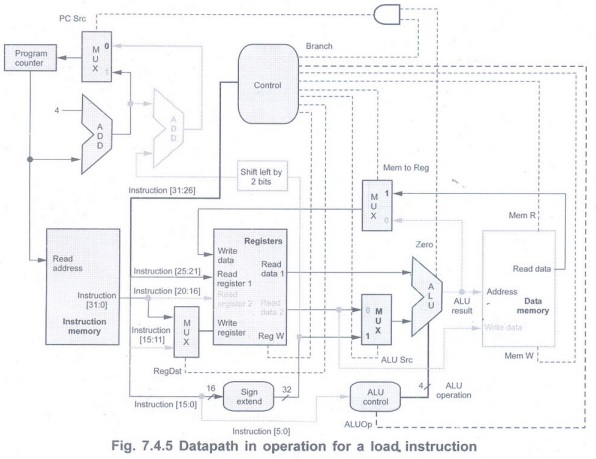
• Fig. 7.4.5 shows the operation of the
datapath for load word instruction. Here as an example we have considered
instruction: Iw $t1, offset($t2). The execution of the load instruction can be
divided into sequential steps according to flow of information as given below:
1. Fetch the instruction and increment
the PC.
2. Read data from register $t2 of
register file.
3. Compute the sum of the value read
from the register file and the sign-extended, lower 16 bits of the instruction
(offset) using ALU.
4. Use the sum from the ALU as the
address for the data memory.
5. Write the data from the memory unit
into the register file; the register destination is given by bits 20: 16 of the
instruction ($t1).
Note The control
lines, datapath units, and connections that are active are highlighted.
• A load and store instructions operate
very similarly. The main differences are that the memory control indicate a
write rather than a read, the value of the second
register is used for the data to store,
and the operation of writing the data memory value to the register file is not
necessary.
Datapath for
Branch - On - Equal Instruction
• Fig. 7.4.6 shows the operation of the
datapath for branch-on-equal instruction. Here as an example we have considered
instruction: beq $t1, $t2, offset. It operates much like an R-format
instruction, but the ALU output is used to determine whether the PC is written
with PC + 4 or the branch target address. The execution of the branch-on-equal
instruction can be divided into sequential steps according to flow of
information as given below :
1. Fetch the instruction and increment
the PC.
2. Read data from two registers, $t2 and
$t3.
3. Generate the ALU function using the
function code for subtract operation (bits 5 0, which is the funct field, of
the instruction) and perform subtraction on the data read from the register
file. Add the value of PC + 4 to the sign-extended, lower 16 bits of the
instruction (offset) shifted left by two to get the branch target address.
4.Use the Zero result from the ALU to
decide which adder result to store into the PC.
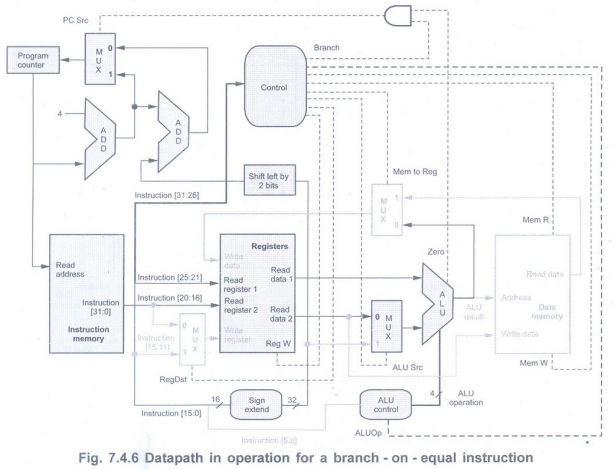
Note The control
lines, datapath units and connections that are active are highlighted.
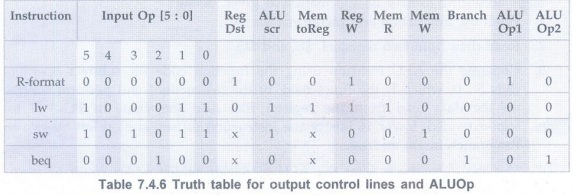
Finalizing Control
• The control function can be precisely
defined using the contents of Table 7.4.6. The outputs are the control lines,
and the input is the 6-bits opcode field, Op [5: 0], i.e. bits 31 26 of the
instruction. Thus, we can create a truth table for each of the outputs based on
the binary encoding of the opcodes as shown in the Table 7.4.6.
Implementing Jumps
• The jump instruction is not
conditional. Fig 7.4.7 shows the format of jump instruction.
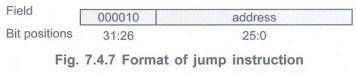
• Like a branch, the low-order 2 bits of
a jump address are always 002. The next lower 26 bits of this
32-bits address come from the 26-bits immediate (address) field in the
instruction. The upper 4 bits of the address that should replace the PC come
from the PC of the jump instruction plus 4. Thus, we can implement a jump by
storing into the PC the concatenation of
• The upper 4 bits of the current PC + 4
• The 26-bits immediate field of the jump
instruction
• The bits 00two
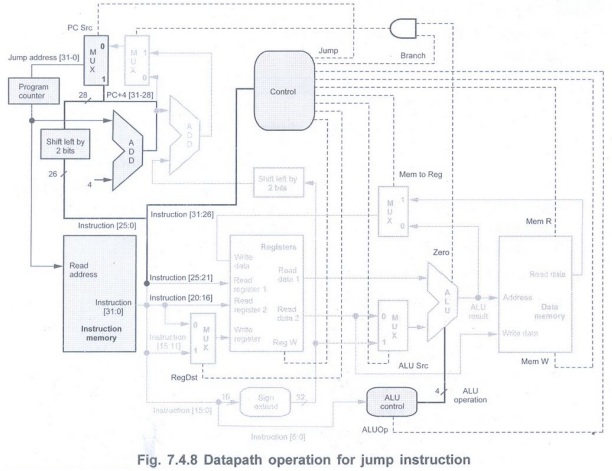
•Fig. 7.4.8 shows the datapath operation
for jump instruction. Here, additional control is added to Fig. 7.4.3 for jump
instruction. An additional multiplexer is used to select the source for the new
PC value, which is either the incremented PC (PC + 4), the branch target PC, or
the jump target PC. One additional control signal is added for the additional
multiplexer. This control signal, called Jump, is asserted only when the
instruction is a jump-that is, when the opcode is 2.
Reasons for not
using Single - Cycle Implementation
1. It is inefficient. Because the longest
possible path in the processor determines the clock cycle. Remember that the
clock cycle must have the same length for every instruction in single-cycle
design.
2. The overall performance of a
single-cycle implementation is likely to be poor, since the clock cycle is too
long.
3. The penalty for using the
single-cycle design with a fixed clock cycle is significant. Single-cycle
designs for floating-point unit or an instruction set with more complex
instructions do not work well at all.
4. It do not improve the worst-case
cycle time. Thus it violates the great idea of making the common case fast.
Review Questions
1. State the advantages of multiple
levels of decoding.
2. Give instruction formats for R type,
load or store and branch instructions.
3. Draw the simple combine datapath with
all necessary multiplexers and control lines.
4. State the functions of following
control lines.
a) PC Src b) ALU Src c) RegDstd) Mem R
5. Draw and explain the simple datapath
with the control unit and explain the execution of ALU instructions. AU:
Dec.-18, Marks 13
6. With the help of a neat diagram
explain the operation of datapath for R type instruction.
7. With the help of a neat diagram
explain the operation of datapath for load instruction.
8. Give the sequential steps required
for execution of R-type instruction.
9. Give the sequential steps required
for execution of load instruction.
10. Explain the operation of datapath
for branch instruction.
11. Give the sequential steps required
for execution of branch operation.
12. Draw the format of jump instruction.
13. Draw and explain the datapath
operation for jump instruction.
14. State the reasons for not using
single cycle implementation.
15. Explain data path control in detail. AU:
Dec.-14, Marks 8
Digital Principles and Computer Organization: Unit IV: Processor : Tag: : Processor - Digital Principles and Computer Organization - Designing a Control Unit
Related Topics
Related Subjects
Digital Principles and Computer Organization
CS3351 3rd Semester CSE Dept | 2021 Regulation | 3rd Semester CSE Dept 2021 Regulation