Introduction to Operating Systems: Unit III: Memory Management
Contiguous Memory Allocation with Variable Size Partitions
Memory Management - Introduction to Operating Systems
The use of unequal size partitions provides a degree of flexibility to fixed partitioning. In dynamic partitioning, the partitions are of variable length and number.
Contiguous Memory Allocation with
Variable Size Partitions
AU:
Dec.-17
• The use of unequal size partitions
provides a degree of flexibility to fixed partitioning. In dynamic
partitioning, the partitions are of variable length and number.
• In noncontiguous memory allocation, a
program is divided into blocks that the system may place in nonadjacent slots
in main memory.
• This allocation method do not suffer
from internal fragmentation, because a process partition is exactly the size of
the process.
• Fig. 4.4.1 shows noncontiguous memory
allocation method. Operating system maintain the table which contains the memory
areas allocated to process and free memory. Memory management unit use this
information for allocating processes.
• Table contains information about
memory starting address for process/program and their size.


• CPU sends the logical address of the
process to the MMU and the MMU uses the memory allocation information stored in
the table for calculating logical address. We called this address as effective
memory address of the data/instruction.
Difference between Contiguous and Noncontiguous Memory

Fragmentation
• Fragmentation are of two types:
1. Internal fragmentation.
2. External fragmentation.
• In fragmentation, OS cannot use
certain area of available memory.
Internal
fragmentation
•
There
is wasted space internal to a partition due to the fact that the block of data
loaded is smaller than the partition is called as internal fragmentation.
•
Fig.
4.4.2 shows an internal fragmentation.
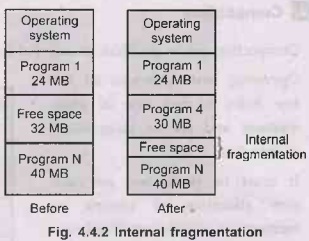
• To keep track of this free hole is overhead for system.
External
fragmentation
• It occurs when enough total main memory
space exists to satisfy a request, but it is not contiguous, storage
fragmentated into a large number
of small holes.
•
Fig. 4.4.3 shows external fragmentation.

• Following are the solution for external
fragmentation:
1. Compaction
2. Logical address space of a process/program
Difference between Internal and External Fragmentation

Compaction
• Compaction solves problem of external
fragmentation. Fig. 4.4.4 shows compaction.

• Operating system moves all the free
holes to one side of main memory and creates large block
• It must be performed on each new
allocation of process to memory or completion of process for memory. System
must also maintain relocation information.
•
All free blocks are brought together as one large block of free space.
Compaction requires dynamic relocation.
• Compaction has a cost and selection of
an optimal compaction strategy is difficult. One method for compaction is
swapping out those processes that are to be moved within the memory and
swapping them into different memory locations.
• Compaction is not always possible.
Compaction is time consuming method and wastage of the CPU time.
Garbage
collection
• Some programs use dynamic data
structures. These programs dynamically use and discard memory space.
Technically, the deleted data items release memory locations.
• But, in practice the OS does not
collect such free space immediately for allocation. This is because that
affects performance. Such areas, therefore are called garbage.
• When such garbage exceeds a certain
threshold the OS would not have enough memory available for any further
allocation.
Placement Algorithms
•
In an environment that supports dynamic memory allocation, the memory manager
must keep a record of the usage of each allocatable block of memory. This
record could be kept by using almost any data structure that implements linked
lists.
• An obvious implementation is to define
a free list of block descriptors, with each descriptor containing a pointer to
the next descriptor, a pointer to the block and the length of the block.
• The memory manager keeps a free list
pointer and inserts entries into the list in some order conductive to its
allocation strategy. A number of strategies are used. to allocate space to the
processes that are competing for memory.
• Fig. 4.4.5 shows the placement algorithm.

Best
fit: The allocator places a process in
the smallest block of unallocated memory in which it will fit. For example,
suppose a process requests 12 kB of memory and the memory manager currently has
a list of unallocated blocks of 6 kB, 14 kB, 19 kB, 11 kB and 13 kB blocks. The
best-fit strategy will allocate 12 kB of the 13 kB block to the process.
•
Best fit chooses the block that is closest in the size to the request.
Problems
of best fit
•
It requires an expensive search of the entire free list to find the best hole.
• More
importantly, it leads to the creation of lots of little holes that are not big
enough to satisfy any requests. This situation is called fragmentation and is a
problem for all memory-management strategies, although it is particularly bad
for best-fit.
Solution:
One way to avoid making little holes is to give the
client a bigger block than it asked for. For example, we might round all
requests up to the next larger multiple of 64 bytes. That
doesn't make the fragmentation go away, it
just hides it. Unusable space in the form of holes is called external
fragmentation.
2. Worst fit:
The memory manager places a process in the largest block of unallocated memory
available. The idea is that this placement will create the largest hold after
the allocations, thus increasing the possibility that compared to best fit;
another process can use the remaining space. Using the same example as above,
worst fit will allocate 12 kB of the 19 kB block to the process, leaving a 7 kB
block for future use.
3.
First fit: There may be many holes in the memory, so the
operating system, to reduce the amount of time it spends analyzing the
available spaces, begins at the start of primary memory and allocates memory
from the first hole it encounters large enough to satisfy the request. Using the
same example as above, first fit will allocate 12 kB of the 14 kB block to the
process.
4. Next fit:
The first fit approach tends to fragment the blocks near the beginning of the
list without considering blocks further down the list. Next fit is a variant of
the first-fit strategy. The problem of small holes accumulating is solved with
next fit algorithm, which starts each search where the last one left off,
wrapping around to the beginning when the end of the list is reached (a form of
one-way elevator).
• Notice in the diagram above that the
best fit and first fit strategies both leave a tiny segment of memory
unallocated just beyond the new process.
Example 4.4.1 Given memory partitions of 100 K, 500 K, 200 K,
300 K and 600 K (in order) how would each of the first-fit, best-fit and
worst-fit algorithms place processes of 212 K, 417 K, 112 K and 426 K (in
order)? Which algorithm makes the most efficient use of memory?
Solution: First-fit:
212 K is put in 500 K partition
417 K is put in 600 K partition
112 K is put in 288 K partition (new
partition 288 K = 500 K - 212 K)
426 K must wait.
Best-fit:
212 K is put in 300 K partition
417 K is put in 500 K partition
112 K is put in 200 K partition
426 K is put in 600 K partition
Worst-fit:
212 K is put in 600 K partition
417 K is put in 500 K partition
112 K is put in 388 K partition (600 K -
212 K)
426
K must wait
In
this example, Best-fit turns out to be the best.
University Question
Introduction to Operating Systems: Unit III: Memory Management : Tag: : Memory Management - Introduction to Operating Systems - Contiguous Memory Allocation with Variable Size Partitions
Related Topics
Related Subjects
Introduction to Operating Systems
CS3451 4th Semester CSE Dept | 2021 Regulation | 4th Semester CSE Dept 2021 Regulation