Artificial Intelligence and Machine Learning: Unit I(f): Constraint Satisfaction Problems (CSP)
Constraint Satisfaction
Constraint Satisfaction Problems (CSP) - Artificial Intelligence and Machine Learning
Constraint satisfaction problem has various states and goal test, a tranditional problem has been converted into standard structured and very simple "representation".
UNIT I
Chapter: 6: Constraint Satisfaction Problems (CSP)
Constraint Satisfaction
Constraint Satisfaction Problems - The Concept
1.
Constraint satisfaction problem has various states and goal test, a
tranditional problem has been converted into standard structured and very
simple "representation".
2.
The general-purpose routines can be used to access a special representation
which has more benefit than problem-specific heuristics. These routines
combined with special structure can find solution of large problems.
3.
The structure of the problem is represented in different form such as, standard
representation of the goal test.
4.
The revealed structured is very efficient in many ways such as,
i)
Problem decomposition.
ii)
To understand structure of problem and the diffculty of solving it and
their connection.
5.
If the problem is treated as CSP we have many advantages, as discussed below.
i)
As the representation of states have standard pattern [that is a set of
variables with assigned values], we can design successor function and goal test
in generic way that will apply to all CSPs.
ii)
We can develop effective generic heuristic that require no additional domain
specific expertise.
iii)
The structure of the constraint graph can be used to simplify the solution
process in some cases giving exponential reduction in complexity.
Formal Definition of Constraint Satisfaction Problems
1. A
constraint satisfaction problem is defined by a set of variables X1,
X2,...., Xn and a set of constraints C1, C2,
..., Cm.
2.
Each variable X1 has a nonempty domain D1 of possible
values.
3.
Each constraint C1 involves some subset of the variables and specifies the
allowable combinations of values for that subset.
4. A
state of the problem is defined by an assignment of values to some or all of
the variables {Xi = Vi, Xj = Vj,....
}
5.
An assignment that does not violate any constraints is called a consistent or
legal assignment.
6. A
complete assignment is one in which every variable is mantained and a solution
to a CSP is, a complete assignment that satisfies all the constraints.
7.
Some CSPs also require a solution that maximizes an objective function.
Consider
following graph colouring problem.
Constraints
are -
1)
We have three colours for colouring avertex.
2)
No two adjacent vertices have same colour. Given three colours-(Red, Green,
Blue). Allowable combination for A, B vertices would be,
{(R,
G), (R, B), (G, R), (G, B), (B, R), (B, G)}

Examples of CSP
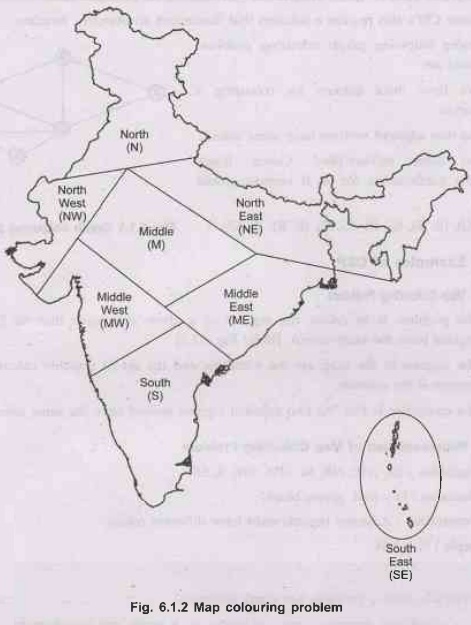
1. Map Colouring Problem
1.
The problem is to colour the regions of a given map such that no 2 adjacent
regions have the same colour. [Refer Fig. 6.1.2]
2.
The regions in the map are the variables and the set of possible colours for
the regions is the domain.
3.
The constraint is that "no two adjacent regions should have the same
colour."
Formal
Representation of Map Colouring Problem
1.
Variables: (N, NW, NE, M, MW, ME, S,
SE}
2.
Domains: D = (red, green, blue}
3.
Constraints: Adjacent regions must have
different colors.
Example:
N ≠ NW
Note
1.
Typically, such a problem has many solutions.
2. We
sometimes represent map colouring as a graph coloring (constraint graph)
problem.
3.
The topology of a constraint graph can sometimes be used to identify solutions
easily.
Example Map
2. Other Examples of CSP
1.
N-queens puzzle.
2.
Jobshop scheduling.
3.
Scene labelling.
4.
Circuit board layout.
5.
Map colouring problem.
6.
Sudoku
7.
Boolean satisfiability.
Some
real-world problems
1.
Assignment problems.
2.
Transporation scheduling.
3.
Hardware configuration.
4.
Spreadsheets.
5.
Factory scheduling.
6.
Floor planning.
Incremental Formulation for CSP
•
It is fairly easy to see that a CSP can be given an
incremental formulation as a standard serach problem as follows:
i)
Initial state -
The
empty assignment {}, in which all variables are unassigned.
ii)
Successor functions -
A
value can be assigned to any unassigned variable, provided that it does not
conflict with previously assigned variables.
iii)
Goal test -
The
current assignment is complete.
iv)
Path cost -
A
constant cost for every step.
Searching for Goal State in CSP
1.
Every solution must be a complete assignment and therefore appears at depth n
if there are n variables.
2.
The search tree extends only to depth n.
3.
Depth-first search algorithms are popular for CSPs.
4.
The path by which a solution is reached is irrelevant.
5.
We can also use a complete-state formulation, in which every state is a
complete assignment that might or might not satisfy the constraints.
6.
Local search methods work well for this formulation.
Variations in CSPs
1.
The simplest kind of CSP involves variables that are discrete and have finite
domains. Graph-coloring problems are of this kind. The 8-queens problem
described can also be viewed as finite-domain CSP, where the variables Q1,...,
Q8 are the positions of each queen in colums 1,..., 8 and each variable has the
domain (1, 2, 3, 4, 5, 6, 7, 8). If the maximum domain size of any variable is
a CSP in d, then the number of possible complete assignments are O(dn)
that is exponential in the number of variables.
2.
Finite-domain CSPs include Boolean CSPs, whose variables can be either true or
false. Boolean CSPs include, as special cases, some NP-complete problems, such
as 3SAT.
3.
In most practical applications, however, general-purpose CSP algorithms can
solve problems of orders of magnitude larger than those solvable via the
general-purpose search algorithms that we saw.
4.
Discrete variables can also have infinite domains-for example, the set of
integers or the set of strings.
5.
Constraints satisfaction problems with continuous domains are very common in
the real world and are widely studied in the field of operations research.
For
example, the scheduling of experiments on the Hubble Space Telescope requires
very precise timing of observations; the start and finish of each observation
and maneuver are continuous-valued variables that must obey a variety of
astronomical, precedence and power constraints. The best-known category of continuous-domain
CSPs is that of linear programming problems where constraints must be linear
inequalities.
Constraints in CSPs
1. Properties of Constraints
Constraints
are used to guide reasoning of everyday common sense. The constraints have following
properties.
1.
Constraints may specify partial infomation; constraint need not uniquely
specify the values of its variables.
2.
Constraints are non-directional, typically a constraint on (say) two variables
V1, V2 can be used to infer a constraint on V1
given a constraint on V2 and viceversa.
3.
Constraints are declarative; they specify what relationship must hold without
specifying a computational procedure to enforce that relationhip.
4.
Constraints are additive; the order of imposition of constraints does not
matter, all that matters at the end is that the conjunction of constraints is
in effect.
5.
Constraints are really independent; typically constraints in the constraint
store (i.e. collection of constraints) share variables.
2. Types of Constraints in CSPs
1.
Unary constraint - Which restricts the value
of a single variable. Every unary be eliminated simply by prepressing the
domain of the corresponding variable to remove any value that violates the
constraint.
For
example- Constraint can be that, Vertex A can
not be coloured with bluecolour.
2.
Binary constraint - Relates two variables. A
binary CSP is one with only binary constraints; it can be represented as a
constraint graph.
For
example - In graph colouring problem two adjacent
vertices can not have same colour.
3.
Higher-order constraints -
Involves
three or more variables. A familiar example is provided by cryptarithmetic
puzzles. It insist that each letter in a cryptarithmetic puzzle represent a
different digit. Higher-order constraints can be represented in a constraint
hypergraph. Such as shown below:-
Example
1 -
The
cryptarithmatic problem. (A CSP problem having high order constraints)

Example
2 - Explain the constraint satisfaction procedure to solve the
cryptarithmetic problem.
Solution: (At each step minimum possible value is selected.)


General Algorithm for Finding Solution in CSP
1.
Propagate available constraints -
i)
Open all objects that must be assigned values in a complete solution.
ii)
Repeat until inconsistency or all objects are assigned valid values: Select an
object and strengthen as much as possible, the set of constraints that apply to
object. If set of constraints are different from previous set, then open all
objects that share any of these constraints. Remove selected object.
2.
If union of constraints discovered above defines a solution then return
solution.
3.
If union of constraints discovered above defines a contradiction then return
failure.
4.
Make a guess in order to proceed. Repeat until a solution is found or all
possible solutions exhausted;
i)
Select an object with a no assigned value and try to strengthen its
constraints.
ii)
Recursively invoke constraint satisfaction with the current set of constraints
plus the selected strengthening constraint.
•
CSP Representation as a Constraint Graph
The
CSP can be represented in terms of the constraint graph. A constrain graph has,
1.
Nodes as variables (For example In graph-colouring problem the vertex is
variable which needs to be coloured. This vertex will be a node in constraint
graph.)
2.
Arcs as a constraints (For example - In graph-colouring problem the arc will
denote that no two adjacent vertices will have same colour.)
•
Advantages of Constraint Graph
1.
The organization of constraint graph is very much useful for simplification of
CSP's solutions.
2.
It reduces complexity in exponential manner.
Artificial Intelligence and Machine Learning: Unit I(f): Constraint Satisfaction Problems (CSP) : Tag: : Constraint Satisfaction Problems (CSP) - Artificial Intelligence and Machine Learning - Constraint Satisfaction
Related Topics
Related Subjects

Artificial Intelligence and Machine Learning
CS3491 4th Semester CSE/ECE Dept | 2021 Regulation | 4th Semester CSE/ECE Dept 2021 Regulation