Digital Principles and Computer Organization: Unit IV: Processor
Building a Data Path
Processor - Digital Principles and Computer Organization
The MIPS implementation includes, the datapath elements (a unit used to operate on or hold data within a processor) such as the instruction and data memories, the register file, the ALU, and adders.
Building a Data Path
AU:
Dec.-14, May-15
• As shown in Fig. 7.3.2, the MIPS
implementation includes, the datapath elements (a unit used to operate on or
hold data within a processor) such as the instruction and data memories, the
register file, the ALU, and adders.
• Fig. 7.3.1 shows the combination of the
three elements (instruction memory, program counter and adder) from Fig. 7.3.2
to form a datapath that fetches instructions and increments the PC to obtain
the address of the next sequential instruction.

• The instruction memory stores the
instructions of a program and gives instruction as an output corresponding to
the address specified by the program counter. The adder is used to increment
the PC by 4 to the address of the next instruction.
• Since the instruction memory
only reads, the output at any time reflects the contents of the location
specified by the address input, and no read control signal is needed.
• The program counter is a 32-bits
register that is written at the end of every clock cycle and thus does not need
a write control signal.
• The adder always adds its two 32-bits
inputs and place the sum on its output.
Datapath Segment for Arithmetic - Logic Instructions
• The arithmetic-logic instructions read
operands from two registers, perform an ALU operation on the contents of the
registers, and write the result to a register. We call these instructions as
R-type instructions. This instruction class includes add, sub, AND, OR, and
slt. For example, OR $t1, $t2, $t3 reads $t2 and $t3, performs logical OR
operation and saves the result in $t1.
• The processor's 32 general-purpose
registers are stored in a structure called a register file. A register file is
a collection of registers in which any register can be read or written by
specifying the number of the register in the file. The register file contains
the register state of the computer.
• Fig. 7.3.2 shows multiport register
file (two read ports and one write port) and the ALU section of Fig. 7.3.2 We
know that, the R-format instructions have three register operands: numbers Two
source operands and one destination operand.

• For each data word to be read from the
register file, we need to specify the register number to the register file. On
the other hand, to write a data word, we need two inputs: One to specify the
register number to be written and one to supply the data to be written into the
register.
•The register file always outputs the
contents of whatever register numbers are on the Read register inputs. Write
operations, however, are controlled by the write control (Reg W) signal. This
signal is asserted for a write operation at the clock edge.
• Since writes to the register file are
edge-triggered, it is possible to perform read and write operation for the same
register within a clock cycle: The read operation gives the value written in an
earlier clock cycle, while the value written will be available to a read in a
subsequent clock cycle.
• As shown in Fig. 7.3.2, the register
number inputs are 5 bits wide to specify one of 32 registers, whereas the data
input and two data output buses are each 32 bits wide.
Datapath Segment for Load Word and Store Word Instructions
• Now, consider the MIPS load word and
store word instructions, which have the general form lw $t1, offset_value($t2)
or sw $t1, offset_value ($t2).
• In these instructions $t1 is a data
register and $t2 is a base register. The memory address is computed by adding
the base register ($t2), to the 16-bits signed offset value specified in the
instruction.
• In case of store instruction, the
value from the data register ($t1) must be read and in case of load
instruction, the value read from memory must be written into the data register
($t1). Thus, we will need both the register file and the ALU from Fig. 7.3.2.
• We know that, the offset value is
16-bits and base register contents are 32-bits. Thus, we need a sign-extend
unit to convert the 16-bits offset field in the instruction to a 32-bits signed
value so that it can be added to base register.
• In addition to sign extend unit, we
need a data memory unit to read from or write to. The data memory has read and
write control signals to control the read and write operations. It also has an
address input, and an input for the data to be written into memory. Fig. 7.3.3
shows these two elements.
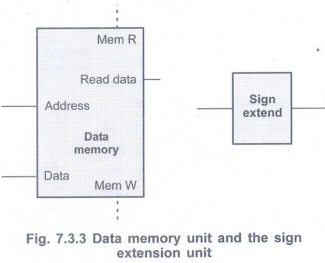
• Sign extension is implemented by
replicating the high-order sign bit of the original data item in the high-order
bits of the larger, destination data item.
• Therefore, two units needed to implement loads and stores, in addition to the register file and ALU of Fig. 7.3.2, are the data memory unit and the sign extension unit.
Datapath Segment for Branch Instruction
• The beq instruction has three operands,
two registers that are compared for equality, and a 16-bits offset which is
used to compute the branch target address relative to the branch instruction
address. It has a general form beq $t1, $t2, offset.
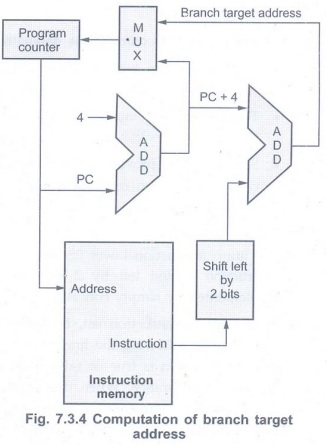
• To implement this instruction, it is
necessary to compute the branch target address by adding the sign-extended
offset field of the instruction to the PC. The two important things in the
definition of branch instructions which need careful attention are:
• The instruction set architecture
specifies that the base for the branch address calculation is the address of
the instruction following the branch (i.e., PC + 4 the address of the next
instruction.
• The architecture also states that the
offset field is shifted left 2 bits so that it is a word offset; this shift
increases the effective range of the offset field by a factor of 4.
• Therefore, the branch target address is
given by
Branch target address = PC+4 + offset
(shifted left 2 bits)
• In addition to computing the branch
target address, we must also see whether the two operands are equal or not. If
two operands are not equal the next instruction is the instruction that follows
sequentially (PC= PC+4); in this case, we say that the branch is not taken. On
the other hand, if two operands are equal (i.e., condition is true), the branch
target address becomes the new PC, and we say that the branch is taken.
• Thus, the branch datapath must perform
two operations : Compute the branch target address and compare the
registercontents.
• Fig. 7.3.5 shows the structure of the
datapath segment that handles branches.

• To compute the branch target address,
the branch datapath includes a sign extension unit, shifter and an adder.
• To perform the compare, we need to use
the register file and the ALU shown in Fig. 7.3.2.
• Since the ALU provides an Zero signal
that indicates whether the result is 0, we I can send the two register operands
to the ALU with the control set to do a subtract operation. If the Zero signal
is asserted, we know that the two values are equal.
• For jump instruction lower 28 bits of
the PC are replaced by lower 26 bits of the instruction shifted left by 2 bits
and making two LSB bits 0. This can be implemented by simply concatenating 00
to the jump.
• In the MIPS instruction set, branches
are delayed, meaning that the instruction immediately following the branch is
always executed, independent of whether the branch condition is true or false.
When the condition is false, the execution looks like a normal branch. When the
condition is true, a delayed branch first executes the instruction immediately
following the branch in sequential instruction order before jumping to the
specified branch target address.
Creating a Single Datapath
• We can combine the datapath components
needed for the individual instruction classes into a single datapath and add
the control to complete the implementation.
• This simplest datapath will attempt to
execute all instructions in one clock cycle. This means that no datapath
resource can be used more than once per instruction, so any element needed more
than once must be duplicated. We therefore need a memory for instructions
separate from one for data. We need the functional units to be duplicated and
many of the elements can be shared by different instruction flows.
• To share a datapath element between
two different instruction classes, we have connected multiple connections to
the input of an element and used a multiplexer and control signal to select
among the multiple inputs.
Example 7.3.1
Show how to build a datapath for the operational portion of the
memory-reference and arithmetic-logical instructions that uses a single
register file and a single ALU to handle both types of instructions, adding any
necessary multiplexers.
Solution :
To create a datapath with only a single register file and a single ALU, we must
support two different sources for the second ALU input, as well as two
different sources for the data stored into the register file. Thus, one
multiplexer is placed at the ALU input and another at the data input to the
register file. Fig. 7.3.6 shows the operational portion of the combined
datapath.

• We can make a simple datapath for the
core MIPS architecture by adding the datapath for instruction fetch, the
datapath from R-type and memory instructions, and the datapath for branches as
shown in the Fig. 7.3.7.

Review Questions
1. Draw and explain the datapath to
implement instruction fetch and PC increment operations.
2. Draw and explain the datapath segment
for arithmetic-logic instructions.
3. Draw and explain the datapath segment
for load word and store word instructions.
4. Draw and explain the datapath segment
for computation of branch target address.
5. Explain the structure of the datapath
segment that handles branches with the help of block diagram.
6. Draw and explain the simple combine
datapath for the MIPS architecture.
7. Explain data path in detail. AU:
Dec.-14, Marks 8
8. What are R-Type instructions? AU
May-15, Marks 2
Digital Principles and Computer Organization: Unit IV: Processor : Tag: : Processor - Digital Principles and Computer Organization - Building a Data Path
Related Topics
Related Subjects
Digital Principles and Computer Organization
CS3351 3rd Semester CSE Dept | 2021 Regulation | 3rd Semester CSE Dept 2021 Regulation