Artificial Intelligence and Machine Learning: Unit I(e): Adversarial search
Alpha-Beta Pruning
Adversarial search - Artificial Intelligence and Machine Learning
The problem with minimax algorithm search is that the number of game states it has to examine is exponential in the number of moves.
Alpha-Beta
Pruning
AU:
Dec.-04, 10, May-10, 17
Motivation for α – β Pruning
1.
The problem with minimax algorithm search is that the number of game states it
has to examine is exponential in the number of moves.
2.
α- β proposes to compute the correct minimax algorithm decision without looking
at every node in the game tree.
α-β
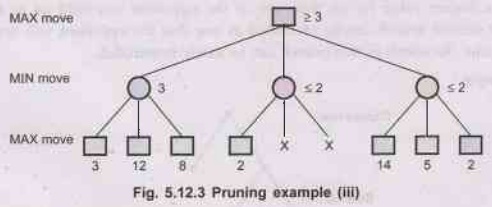
Pruning Example :
Step
1:

Step
2:
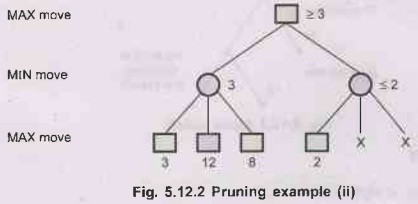
Step
3:
Steps in Alpha-Beta Pruning
1.
MAX player cuts off search when he knows MIN-player can force a provably
bad outcome.
2.
MIN player cuts of search when he knows MAX-player can force provably good (for
MAX) outcome.
3.
Applying an alpha-cutoff means we stop search of a particular branch because we
see that we already have a better opportunity elsewhere.
4.
Applying beta-cutoff means we stop search of a particular branch because we see
that the opponent already has a better opportunity elsewhere.
5.
Applying both forms is alpha-beta pruning.
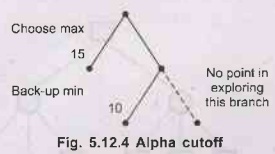
Alpha Cutoff
It
may be found that, in the current branch, the opponent can achieve a state with
a lower value for us than one achievable in another branch. So the current
branch is one that we will certainly not move the game. Search of this branch
can be safely terminated.
For
example
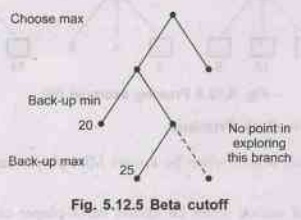
Beta-Cutoff
It
is just the reverse of alpha-cutoff.
It
may also be found, that in the current branch, we would be able to achieve a
state which has a higher value for us than one of the opponent can hold us to
in another branch. The current branch can be identified as one that the
opponent will certainly not move the game. So search in this branch can be
safely terminated.
For
example -
Algorithm of Alpha-Beta Pruning
/*
alpha
is the best score for max along the path to state.
beta
is the beta is the best score for min along the path to state.
*/
If
the level is the top level, let alpha= - infinity, beta = + infinity.
If
depth has reached the search limit apply static evaluation function to state
and return result.
If
player is max:
Until
all of state's children are examined with ALPHA-BETA or until alpha is equal to
or greater than beta:
Call
ALPHA-BETA (child, min, depth + 1, alpha, beta);
note
result
Compare
the value reported with alpha; if reported value is larger reset alpha to the
new value.
Report
alpha
If
player is min:
Until
all of state's children are examined with ALPHA-BETA or until alpha is equal to
or greater than beta:
Call
ALPHA-BETA, (child, max, depth + 1, alpha, beta);
note
result.
Compare
the value reported with beta; if reported value is smaller, reset beta to the
new value.
Report
beta.
Example of Alpha-Beta Pruning (Upto 3rd Ply)
Example
1:
1.
In a game tree, each node represents a board position where one of the player
gets to choose a move.
2.
For example, look at node C in Fig. 5.12.6, as well as look at its left child.
3.
We realize that if the players reach node C, the minimizer can limit the
utility to 2. But the maximizer can get utility 6 by going to node B instead,
so he would never let the game reach C. reach C. Therefore we don't even
have to look at C's other children.
4.
Initially at the root of the tree there is no gurantee about what values the
maximizer and minimizer can achieve. So beta is set to ∞ and alpha to – ∞.
5.
Then as we move down the tree, each node starts with beta and alpha values
passed down from its parent.
6.
If it's a maximizer node, then alpha is increased if a child value is greater
than the current alpha value. Similarly, at a minimizer node, beta may be
dereased. This procedure is shown in Fig. 5.12.6.
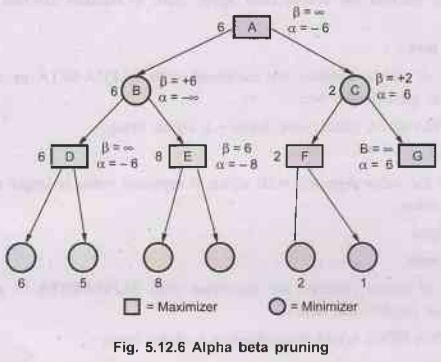
7.
At each node, the alpha and beta values may be updated as we iterate over the
node's children. At node E, when alpha is updated to a value of 8, it ends up
exceeding beta.
8.
This is a point where alpha-beta pruning is required we know the minimizer
would never let the game reach this node, so we don't have to look at its
remaining children.
9.
In fact, pruning happens exactly when alpha becomes greater than or equal to
beta - that is, when the alpha and beta lines hit each other in the node value.
Example
2: Explain Alpha-beta cut-offs in game playing with example.
1) Alpha-beta
cut-offs is a modified version of minimax algorithm, wherein two threshold
values are maintained for future expansion.
2) One
representing a lower bound on the value that a maximizing node ultimately, be
assigned (we call this alpha) and another representing a upper bound on the
value that a minimizing node may be assigned (this we call beta).
3) To
explain how alpha-beta values help, consider the tree structure in Fig. 5.12.7.
• Here, the maximizer has to play followed by the minimizer.
As is done in minimax, look ahead search is done.
•
The maximizer assigns a value 9 at B (minimum of
the value at D and E). This value is passed back to A. So the maximizer is
assured to have a value greater than 9. When it moves to B.
•
Now, consider the case of node C. Value at node F is
5, and at G is unknown.
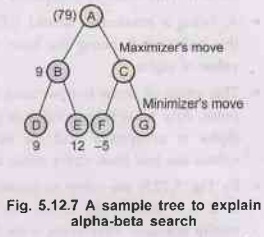
•
Since, the move is a minimizing one, by moving to C,
A can get value - 2 or less than that. This is totally unacceptable to A
because by moving to B, he is assured to have a value equal to 6 or greater
than this.
•
So, by simply pruning the tree whose root is G, one
saves a lot of time in searching.
4) Now
effects of alpha and beta could be understood by Fig. 5.12.8. Here, a look
ahead search is done upto a level 3 as shown in Fig. 5.12.8. The static
evaluation function generator has assigned values which are given for the leaf
nodes. Since, D, E, F and G are maximizers, the maximum of leaf nodes are
assigned to them. Thus D, E, F and G has value 8, 10, 5 and 11.
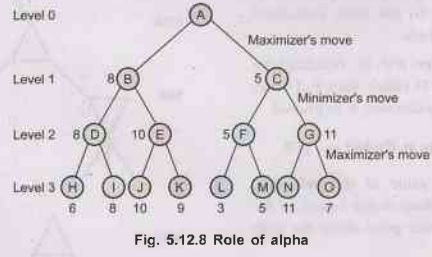
5) Here B and C are minimizers, so they are assigned a value
minimum of their successors i.e., B is assigned a value 8 and C is assigned a
value 5. And A is maximizer so A will obviously opt a value 8.
•
ROLE OF ALPHA - For A, the maximizer, a value of 8 is
assured by moving to node B. This value is compared with that of the value at
C.
•
A, being a maximizer would follow a path whose value
is greater than 8. Hence, this value of 8, being the least that a maximizing
node can obtain is set as the value of alpha.
•
This value of alpha is now used as reference point.
Any node whose value is greater than alpha is acceptable and all nodes whose
values are less than alpha value are rejected. By Fig. 5.12.8, we come to know,
that value at C is 5. Hence, the entire tree under B is totally rejected. That
saves a lot of time and cost.
•
ROLE OF BETA - Now, to know the role of BETA consider
Fig. 5.12.9.
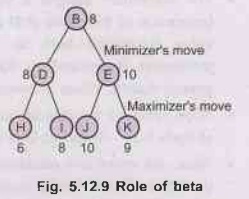
Here,
B is root, B is minimizer and the paths for expansion are chosen from the
values at each leaf nodes.
Since,
D and E are maximizer's the maximum values of their children are backed up as
their static evaluation function values. Node B being, a minimizer will always
move to D rather than E. The value at D(8) is now used by B as a reference.
This value is called beta, the maximum value, a minimizer can be assigned. Any
node whose value is less than this beta value (8) is acceptable and values more
than beta are seldom referred. The value of beta is passed to node E. Comparing
it with the static evaluation function value there.
The
minimizer will be benefited by only moving to D rather than E. Hence, the
entire tree under note E is pruned.
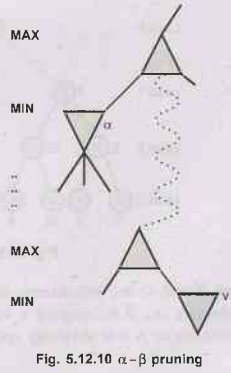
Why is it Called α-β?
•
α is the value of the best (i.e., highest-value)
choice found so far at any choice point along the path for max.
•
If γ is worse than a (as shown in A diagram), max
will avoid it.
•
Similarly ẞ can be defined for min.
Heuristic Function that can be used in Cutting Off Search
1. Evaluation
Functions
1.
An evaluation function returns an estimate of the expected utility of the game
from a given position, just as the heuristic functions return an estimate of
the distance to the goal.
2.
It should be clear that the performance of a game-playing program is dependant
on quality of its evaluation function. An inaccurate evaluation function will
guide an agent toward positions that turn out to be lost.
3.
Designing evaluation Function:
a)
The evaluation function should order the terminal states in the same way as the
true utility function; otherwise, an agent using it might select sub optimal
moves even if it can see ahead all the way to the end of the game.
b)
The computation must not take too long!
c)
For non terminal states, the evaluation function should be strongly correlated
with the actual chances of winning.
2. Imperfect and Real-time Decisions
The
minimax algorithm generates the entire game search space, whereas the
alpha-beta algorithm allow us to prune large parts of it. However, alpha-beta
still has to search all the way to terminal states for at least a portion of
the search space. This depth is usually not practical, because moves must be
made in a reasonable amount of time-typically a few minutes at most.
For
making search faster we can make a heuristic evaluation function that can be
applied to states in the search. It will effectively turn nonterminal nodes
into terminal leaves. In other words, the suggestion is to alter minimax or
alpha-beta in two ways; the utility function is replaced by a heuristic
evaluation function, which gives an estimate of the positions utility, and the
terminal test is replaced by a cutoff test that decides when to apply heuristic
function.
3. Cutting Off Search
1.
Cutting off search is simple approach for searching faster.
2.
The cutting off search is applied to limit the depth.
If
Cutoff-Test (s, depth) then return E(S) problem in cutting off search. (Where E
is evaluation function).
3.
Cutoff test might be applied in adverse condition.
4.
It may stop search before allowable time.
5.
Iterative deepening go until time is elapsed.
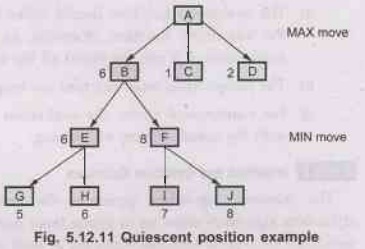
6.
Quiescent position -
a)
If a position looks "dynamic", don't even bother to evaluate it.
b)
Instead, do a small secondary search until things calm down. For example -After
capturing a piece, things look good, but this would be misleading if opponent
was about to capture, right back.
c)
In general such factors are called continuation heuristics.
d) A
quiescent position is a position which is unlikely to exhibit wild swings (huge
changes) in value in near future.
e)
Consider following example –
Here
[Refer Fig. 5.12.11] now since the tree is further explored, the values, which
is passed to A, is 6. Thus the situation calms down. This is called as waiting
for quiescence. This helps in avoiding the horizon effect of a drastic change
of values.
7.
The horizon effect -
A
potential problem that arises in game tree search (of a fixed depth) is the
horizon effect, which occurs when there is a drastic change in value,
immediately beyond the place where the algorithm stops searching. Consider the
tree show in Fig. 5.12.12 (a).
It
has nodes A, B, C and D. At this level since it is a maximizing ply, the value
which will passed up at A is 5.
Suppose
node B is examined one more level as shown in Fig. 5.12.12 (b), then we see
that because of a minimizing ply, value at B is 2 and hence the value passed to
A is 2. This results in a drastic change in the situation. There are two
proposed solutions to this problem

a)
Singular extension -
Which
expands a move that is clearly better than all other moves. Its cost is higher
with branching factor 1.
b)
Secondary search-
One
proposed solution is to examine the search space, beyond the apparently best
one, to see that if something is looming just over the horizon. In that case we
can revert to second-best move. Obviously then the second-best move has the
same problem, and there isn't time to search beyond all possible acceptable
moves.
8.
Additional refinements - Other than alpha-beta
pruning, there are a variety of other modifications to the minimax procedure
that can also enhance its performance.
During
searching, maintain two values alpha and beta so that alpha is the current
lower bound of the possible returned value; beta is the current upper bound of
the possible returned value. If during searching, we know for sure alpha >
beta, then there is no need to search any more in this branch. The returned
value cannot be in this branch. Backtrack until it is the case alpha beta. The
two values alpha and beta are called the ranges of the current search window.
These values are dynamic. Initially, alpha is - ∞ and beta is.
The
quiescence and secondary search technique - If a node represents a state in the
middle of an exchange of pieces, the evaluation function may not give a
reliable estimate of board quality. For example, after a knight is captured,
the evaluation may be good, but this is misleading as the opponent is about to
capture one's queen.
The
solution to this problem is, if node evaluation is not "quiescent",
continue alpha-beta search can be made below that node but limit moves to those
that significantly change evaluation function (for example, capture moves or
promotions). The crucial complexity point is that branching factor for such
moves is small.
For
complicated games it is not feasible to select a move by simply looking-up the
current game configuration in a catalogue (the book move) and extracting the
current move. The catalogue would be huge and very complex for construction.
4. Forward Pruning
1.
It is another method for searching faster.
2.
In this, some moves at a given node are pruned immediately without further
consideration. Clearly, most humans playing chess only consider a few moves
from each position (at least consciously).
3.
Unfortunately, the approach is rather dangerous because there is no guarantee
that the best move will not be pruned away.
4.
This can be disasterous if applied near the root, because it may happen that,
often the program will miss some "obvious" moves.
Artificial Intelligence and Machine Learning: Unit I(e): Adversarial search : Tag: : Adversarial search - Artificial Intelligence and Machine Learning - Alpha-Beta Pruning
Related Topics
Related Subjects

Artificial Intelligence and Machine Learning
CS3491 4th Semester CSE/ECE Dept | 2021 Regulation | 4th Semester CSE/ECE Dept 2021 Regulation